Spatial Data
Mining in Geo-Business
Joseph K, Berry 1
W. M. Keck Visiting Scholar
in Geosciences, Geography,
Principal, Berry &
Associates // Spatial Information Systems (BASIS),
Email: jberry@innovativegis.com; Website: www.innovativegis.com
Kenneth L. Reed 2
Xtreme Data
Mining, Costa Mesa,
This paper was presented at GeoTec, June 2-5, 2008, Ottawa,
Ontario, Canada
Paper available online at http://www.innovativegis.com/basis/present/GeoTec08/ —
click for a printer-friendly .pdf version —
PowerPoint .ppt slide set
Abstract
Most traditional Geo-business applications force spatial
information, such as customer location, to be aggregated into large generalized
reporting units. More recently targeted
marketing, retail trade area analysis, competition analysis and predictive
modeling provide examples applying sophisticated spatial analysis and
statistics to improve decision making and ensure sound business decisions. This paper describes a spatial data mining
process for generating predicted sales maps for various products within a large
metropolitan area. The discussion identifies
the processing steps involved in compiling a spatially-aware customer database
and then applying CART technology for analyzing relative travel-time advantage
coupled with existing customer data to derive information on travel-time
sensitivity and sales patterns. The
conceptual keystone of this application is the concept of a grid-based analytic
frame and its continuous map surfaces that underwrite the spatially aware
database. The column, row index of the
grid cells in the matrix is appended to each record the database and serves as
a primary key for cross-walking information between the
Twisting the Perspective of Map Surfaces
Traditionally one thinks of a
map surface in terms of a postcard scene of the
However, a geomorphological
point of view of a digital elevation model (DEM) isn’t the only type of map
surface. For example, a Customer Density Surface can be derived
from sales data that depicts the peaks and valleys of customer concentrations
throughout a city as discussed in an earlier Beyond Mapping column (November
2005; see author’s note). Figure 1
summarizes the processing steps involved—1) a customer’s street address is
geocoded to identify its Lat/Lon coordinates, 2) vector to raster conversion is
used to place and aggregate the number of customers in each grid cell of an
analysis frame (discrete mapped data),
3) a rowing window is used to count the total number of customers within a
specified radius of each cell (continuous
mapped data), and then 4) classified into logical ranges of customer density.
The important thing to note
is that the peaks and valleys characterize the Spatial Distribution of the customers, a concept closely akin to a Numerical Distribution that serves as
the foundation for traditional statistics.
However in this instance, three dimensions are needed to characterize
the data’s dispersion—X and Y coordinates to position the data in geographic
space and a Z coordinate to indicate the relative magnitude of the variable (#
of customers). Traditional statistics
needs only two dimensions—X to identify the magnitude and Y to identify the
number of occurrences.
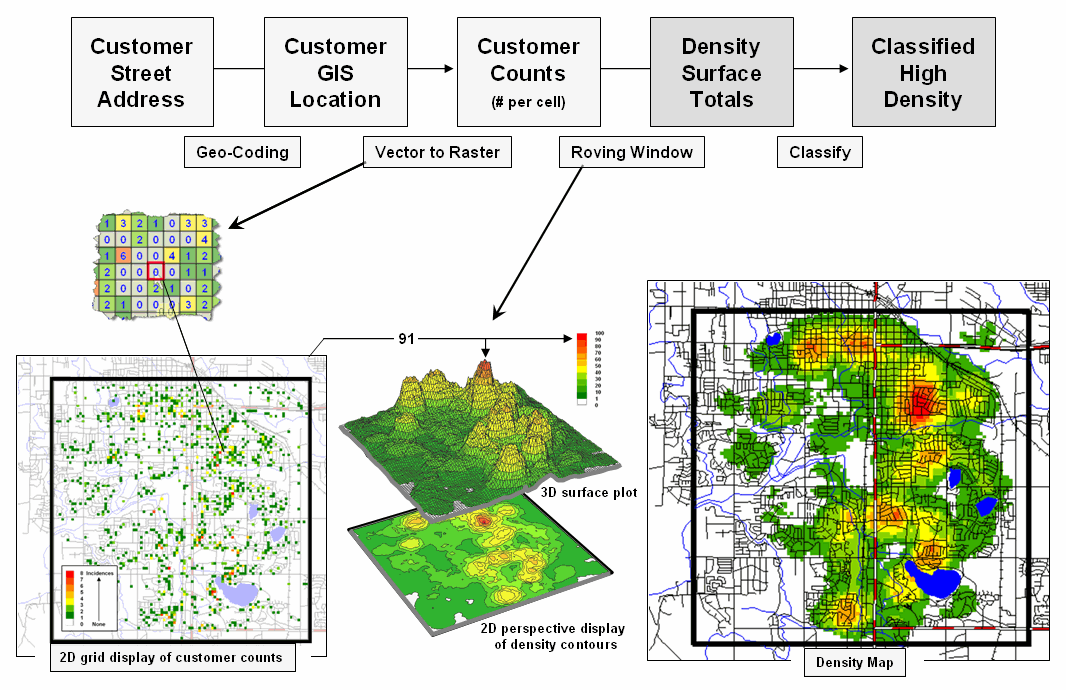
Figure 1. Geocoding can be used to connect customer
addresses to their geographic locations for subsequent map analysis, such as generating a map
surface of customer density.
While both perspectives track
the relative frequency of occurrence of the values within a data set, the spatial
distribution extends the information to variations in geographic space, as well
as in numerical variations in magnitude— from just “what” to “where is
what.” In this case, it describes the
geographic pattern of customer density as peaks (lots of customers nearby) and
valleys (not many).
Within our historical
perspective of mapping the ability to plot “where is what” is an end in
itself. Like Inspector Columbo’s crime
scene pins poked on a map, the mere visualization of the pattern is thought to
be sufficient for solving crimes.
However, the volume of sales transactions and their subtle relationships
are far too complex for a visual (visceral?) solution using just a Google Earth
mashed-up image.
The interaction of numerical
and spatial distributions provides fertile turf for a better understanding of
the mounds of data we inherently collect every day. Each credit card swipe identifies a basket of
goods and services purchased by a customer that can place on a map for
grid-based map analysis to make sense of it all—“why” and “so what.”
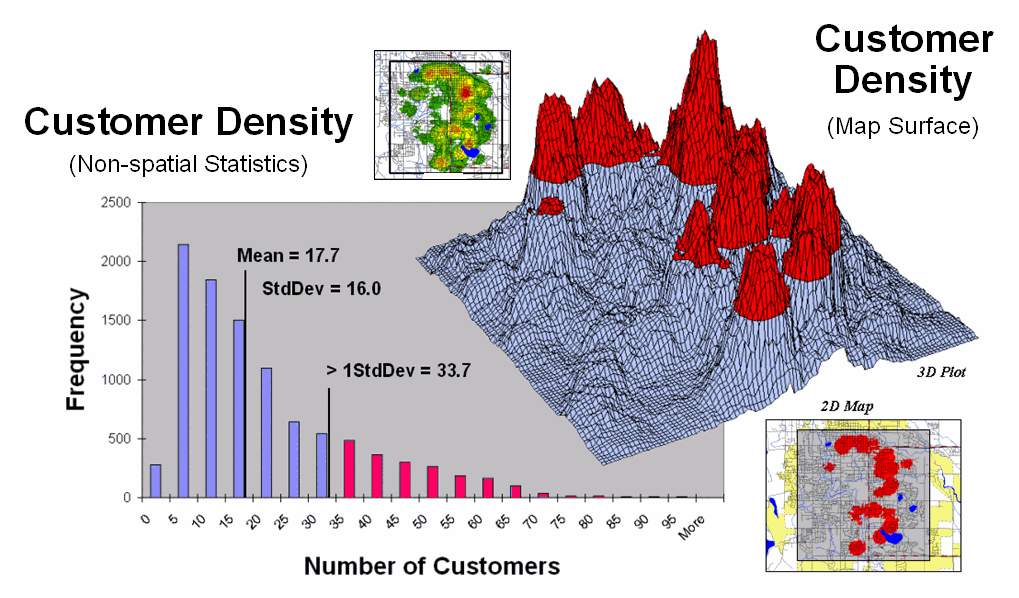
Figure 2. Merging traditional statistics and map
analysis techniques increases understanding of spatial patterns and
relationships (variance-focused; continuous) beyond the usual central tendency
(mean-focused; scalar) characterization of geo-business data.
For example, consider the
left side of figure 2 that relates the unusually high response range of
customers of greater than 1 standard deviation above the mean (a numerical
distribution perspective) to the right side that identifies the location of
these pockets of high customer density (a spatial distribution perspective). As discussed in a previous Beyond Mapping
column (May 2002; see author’s note), this simple analysis uses a typical
transaction database to 1) map the customer locations, 2) derive a map surface
of customer density, 3) identify a statistic for determining unusually high
customer concentrations (> Mean + 1SD), and 4) apply the statistic to locate
the areas with lots of customers. The
result is a map view of a commonly used technique in traditional statistics—an
outcome where the combined result of an integrated spatial and numerical
analysis is far greater than their individual contributions.
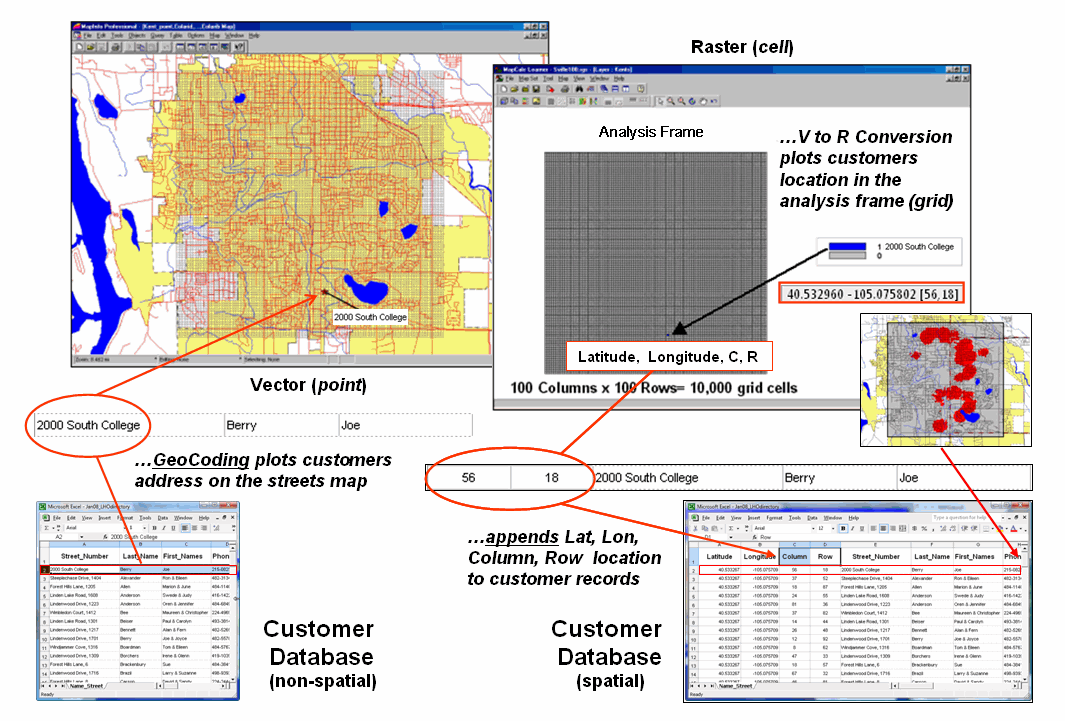
Figure 3. The column, row index of the grid cells in the
analytic frame serves as a primary key for linking spatial analysis results
with individual records in a database.
However, another step is
needed to complete the process and fully illustrate the geo-business
framework. The left side of figure 3 depicts
the translation of a non-spatial customer database into a mapped representation
using vector-based processing that determines Lat/Lon coordinates for each
record—the mapping component.
Translation from vector to raster data structure establishes the analytic
frame needed for map analysis, such as generating a customer density surface
and classifying it into statistically defined pockets of high customer
density—then map analysis component.
The importance of the
analytic frame is paramount in the process as it provides the link back to the
original customer database—the spatial data mining component. The column, row index of the matrix for each
customer record is appended to the database and serves as a primary key for
“walking” between the
Similarly, maps of demographics,
sales by product, travel-time to our store, and the like can be used in
customer segmentation and propensity modeling to identify maps of future sales
probabilities. Areas of high probability
can be cross-walked to an existing customer database (or zip +4 or other
generic databases) to identify new sales leads, product mix, stocking levels,
inventory management and competition analysis.
At the core of this vast potential for geo-business applications are the
analytic frame and its continuous map surfaces that underwrite a spatially
aware database.
Linking Numeric and Geographic Distributions
Another grid-based technique
for investigating customer patterns involves
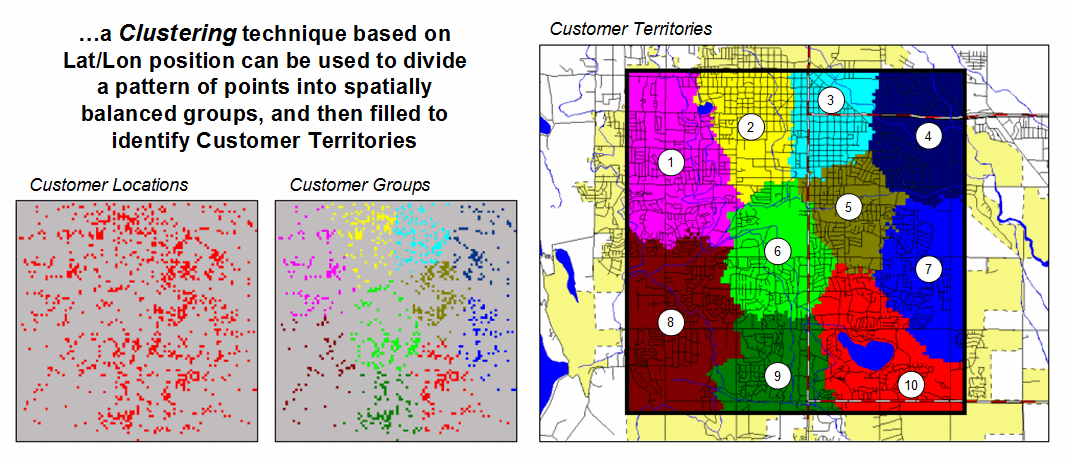
Figure 4. Clustering on the latitude and longitude
coordinates of point locations can be used to identify geographically balanced
customer territories.
The two small inserts on the
left show the general pattern of customers, and then the partitioning of the
pattern into spatially balanced groups.
This initial step was achieved by applying a K-means clustering
algorithm to the latitude and longitude coordinates of the customer
locations. In effect this procedure
maximizes the differences between the groups while minimizing the differences
within each group. There are several
alternative approaches that could be applied, but K-means is an often-used
procedure that is available in all statistical packages and a growing number of
GIS systems.
The final step to assign
territories uses a nearest neighbor interpolation algorithm to assign
all non-customer locations to the nearest customer group. The result is the customer territories map shown
on the right. The partitioning based on
customer locations is geographically balanced (approximately the same area in
each cluster), however it doesn’t consider the number of customers within each
group—that varies from 69 in the lower right (Territory #8) to 252 (Territory
#5) near the upper right… that twist of map analysis will be tackled in a
future beyond mapping column.
However it does bring up an
opportunity to discuss the close relationship between spatial and non-spatial
statistics. Most of us are familiar with
the old “bell-curve” for school grades.
You know, with lots of C’s, fewer B’s and D’s, and a truly select set of
A’s and F’s. Its shape is a perfect bell,
symmetrical about the center with the tails smoothly falling off toward less
frequent conditions.
However the normal distribution (bell-shaped) isn’t as normal (typical) as
you might think. For example, Newsweek noted that the average grade at
a major ivy-league university isn’t a solid C with a few A’s and F’s sprinkled
about as you might imagine, but an A- with a lot of A’s trailing off to lesser
amounts of B’s, C’s and (heaven forbid) the very rare D or F.
The frequency distributions
of mapped data also tend toward the ab-normal
(formally termed asymmetrical). For example, consider the customer density
data shown in the figure 5 that was derived by counting the total number of
customers within a specified radius of each cell (roving window). The geographic distribution of the data is
characterized in the Map View by the 2D contour map and
3D surface on the left. Note the
distinct pattern of the terrain with bigger bumps (higher customer density) in
the central portion of the project area.
As is normally the case with mapped data, the map values are neither
uniformly nor randomly distributed in geographic space. The unique pattern is the result of complex
spatial processes determining where people live that are driven by a host of
factors—not spurious, arbitrary, constant or even “normal” events.
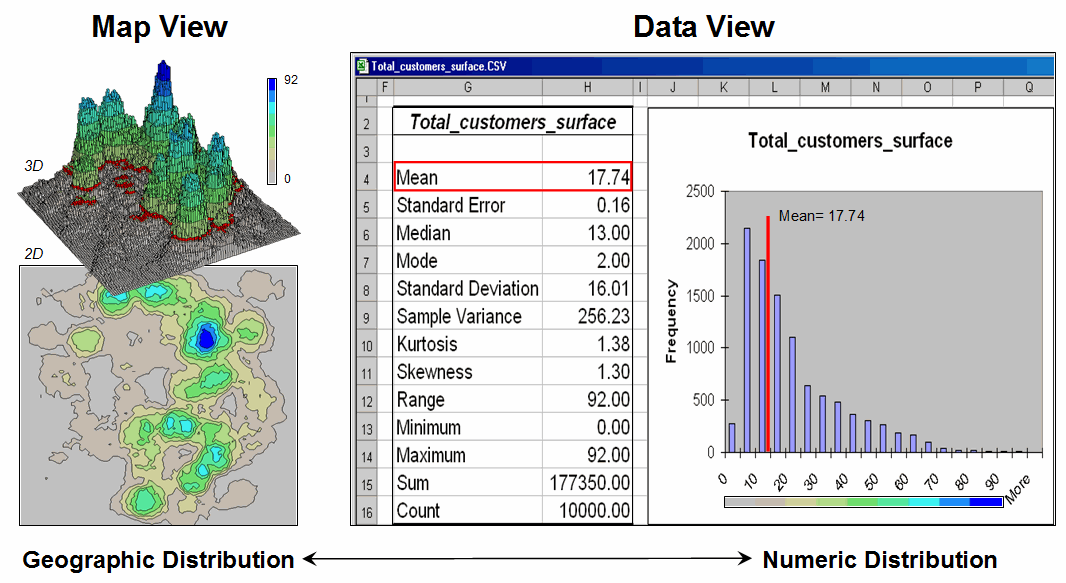
Figure 5. Mapped data are
characterized by their geographic distribution (maps on the left) and their
numeric distribution (descriptive statistics and histogram on the right).
Now turn your attention to
the numeric distribution of the data depicted in the right side of the
figure. The Data View was generated
by simply transferring the grid values in the analysis frame to Excel, then
applying the Histogram and Descriptive Statistics options of the
Data Analysis add-in tools. The map
organizes the data as 100 rows by 100 columns (X,Y) while the non-spatial view
simply summarizes the 10,000 values into a set of statistical indices
characterizing the overall central tendency of the data. The mechanics used to plot the histogram and
generate the statistics are a piece-of-cake, but the real challenge is to make
some sense of it all.
Note that the data aren’t
distributed as a normal bell-curve, but appear shifted (termed skewed) to the
left. The tallest spike and the
intervals to its left, match the large expanse of grey values in the map
view—frequently occurring low customer density values. If the surface contained a disproportionably
set of high value locations, there would be a spike at the high end of the
histogram. The red line in the histogram
locates the mean (average) value for the numeric distribution. The red line in the 3D map surface shows the
same thing, except its located in the geographic distribution.
The mental exercise linking geographic space with data space is a good one, and
some general points ought to be noted.
First, there isn’t a fixed relationship between the two views of the
data’s distribution (geographic and numeric).
A myriad of geographic patterns can result in the same histogram. That’s because spatial data contains
additional information—where, as well
as what—and the same data summary of
the “what’s” can reflect a multitude of spatial arrangements (“where’s”).
But is the reverse true? Can a given geographic
arrangement result in different data views?
Nope, and it’s this relationship that catapults mapping and geo-query
into the arena of mapped data analysis.
Traditional analysis techniques assume a functional form for the
frequency distribution (histogram shape), with the standard normal
(bell-shaped) being the most prevalent.
Spatial statistics, the
foundation of geo-business applications, doesn’t predispose any geographic or
numeric functional forms—it simply responds to the inherent patterns and
relationships in a data set. The next
several sections will describe some of the surface modeling and spatial data
mining techniques available to the venturesome few who are willing to work
“outside the lines” of traditional mapping and statistics.
Interpolating Spatial Distributions
Statistical sampling has long
been at the core of business research and practice. Traditionally data analysis used non-spatial
statistics to identify the “typical” level of sales, housing prices, customer
income, etc. throughout an entire neighborhood, city or region. Considerable effort was expended to determine
the best single estimate and assess just how good the “average” estimate was in
typifying the extended geographic area.
However non-spatial
techniques fail to make use of the geographic patterns inherent in the data to
refine the estimate—the typical level is assumed everywhere the same throughout
a project area. The computed variance
(or standard deviation) indicates just how good this assumption is—the larger
the standard deviation, the less valid is the assumption “everywhere the same.” But no
information is provided as to where values might be more or less than the
computed typical value (average).
Spatial Interpolation, on the other hand, utilizes spatial patterns in a
data set to generate localized estimates throughout the sampled area. Conceptually it “maps the variance” by using geographic position to help explain the
differences in the sample values. In
practice, it simply fits a continuous surface (kind of like a blanket) to the
point data spikes (figure 6).
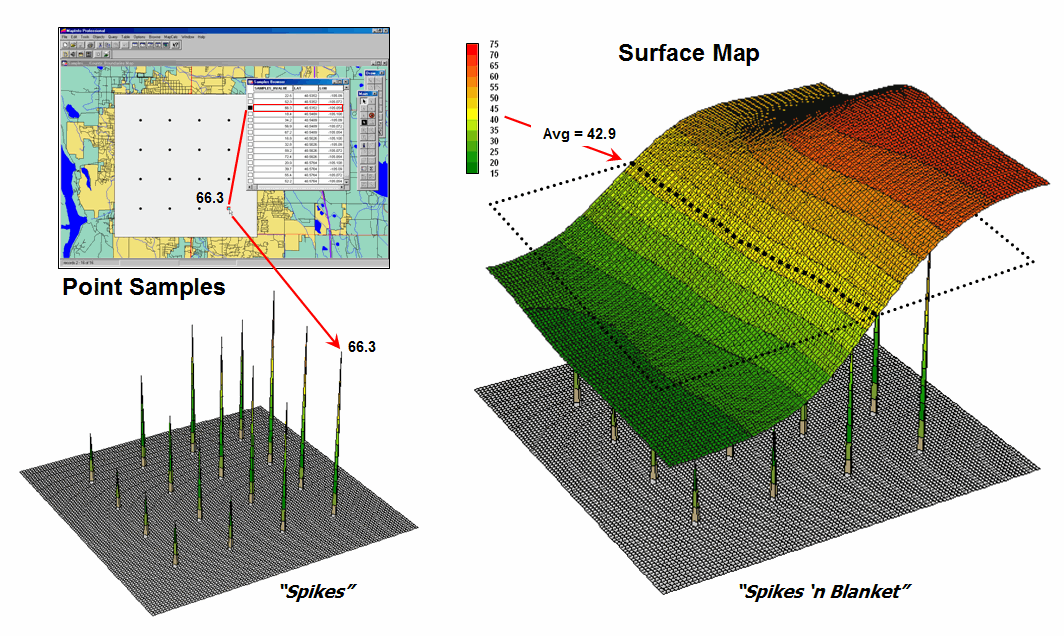
Figure 6. Spatial
interpolation involves fitting a continuous surface to sample points.
While the extension from
non-spatial to spatial statistics is a theoretical leap, the practical steps
are relatively easy. The left side of
figure 1 shows 2D and 3D “point maps” of data samples depicting the percentage
of home equity loan to market value.
Note that the samples are geo-referenced and that the sampling
pattern and intensity
are different than those generally used in traditional non-spatial statistics
and tend to be more regularly spaced and numerous.
The surface map on the right
side of figure 6 translates pattern of the “spikes” into the peaks and valleys
of the surface map representing the data’s spatial distribution. The traditional, non-spatial approach when
mapped is a flat plane (average everywhere) aligned within the yellow
zone. Its “everywhere the same”
assumption fails to recognize the patterns of larger levels (reds) and smaller
levels (greens). A decision based on the
average level (42.88%) would be ideal for the yellow zone but would likely be
inappropriate for most of the project area as the data vary from 16.8 to 72.4
percent.
The process of converting
point-sampled data into continuous map surfaces representing a spatial
distribution is termed Surface Modeling
involving density analysis and map generalization (discussed last month), as
well as spatial interpolation techniques.
All spatial interpolation techniques establish a "roving
window" that—
- moves to a grid location in a project area
(analysis frame),
- calculates an estimate based on the point samples
around it (roving window),
- assigns the estimate to the center cell of the
window, and then
- moves to the next grid location.
The extent of the window
(both size and shape) affects the result, regardless of the summary
technique. In general, a large window capturing a larger number of values
tends to "smooth" the data. A smaller window tends to result in
a "rougher" surface with more abrupt transitions.
Three factors affect the
window's extent: its reach, the number of samples, balancing. The reach,
or search radius, sets a limit on how far the computer will go in collecting
data values. The number of samples establishes how many data
values should be used. If there is more than the specified number of
values within a specified reach, the computer uses just the closest ones.
If there are not enough values, it uses all that it can find within the
reach. Balancing of the data
attempts to eliminate directional bias by ensuring that the values are selected
in all directions around window's center.
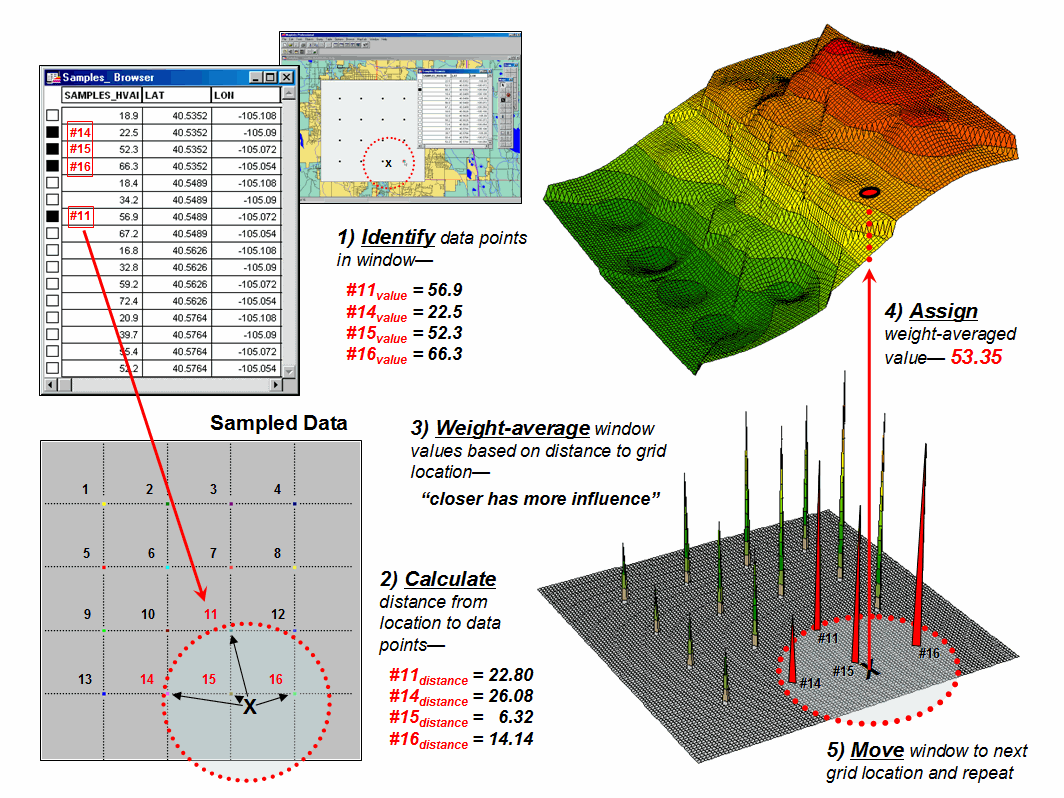
Figure 7. Inverse distance weighted interpolation
weight-averages sample values within a roving window.
The right portion of figure 7
contains three-dimensional (3-D) plots of the point sample data and the inverse
distance-squared surface generated. The estimated value in the example
can be conceptualized as "sitting on the surface," 53.35 units above
the base (zero).
Figure 8 shows the weighted
average calculations for spatially interpolating the example location in figure
7. The Pythagorean Theorem is used to
calculate the Distance from the Grid
Location to each of the data Samples
within the summary window. The distances
are converted to Weights that are
inversely proportional (1/D2; see example calculation in the
figure). The sample Values are multiplied by their computed Weights and the “sum of the products” is divided by the “sum of the
weights” to calculate the weighted average value (53.35) for the location on
the interpolated surface.
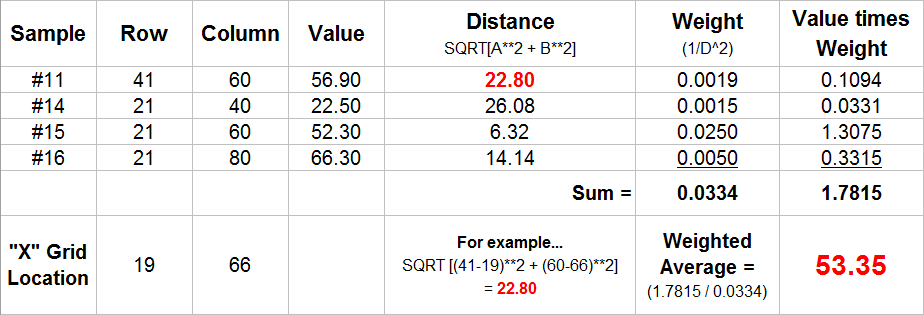
Figure 8. Example Calculations for Inverse Distance
Squared Interpolation.
Because the inverse distance
procedure is a fixed, geometric-based method, the estimated values can never
exceed the range of values in the original field data. Also, IDW tends to
"pull-down peaks and pull-up valleys" in the data, as well as
generate “bull’s-eyes” around sampled locations. The technique is best
suited for data sets with samples that exhibit minimal regional trends.
However, there are numerous
other spatial interpolation techniques that map the spatial distribution
inherent in a data set. Next month’s
column will focus on benchmarking interpolation results from different
techniques and describe a procedure for assessing which is best.
Interpreting Interpolation Results
For some, the previous
discussion on generating map surfaces from point data might have been too simplistic—enter
a few things then click on a data file and, viola, you have a equity
loan percentage surface artfully displayed in 3D with a bunch of cool
colors.
Actually, it is that easy to
create one. The harder part is figuring
out if the map generated makes sense and whether it is something you ought to
use in analysis and important business decisions. This month’s column discusses the relative
amounts of information provided by the non-spatial arithmetic average versus
site-specific maps by comparing the average and two different interpolated map
surfaces. The discussion is further
extended to describe a procedure for quantitatively assessing interpolation
performance.
The top-left inset in figure
9 shows the map of the loan data’s average. It’s not very exciting and looks
like a pancake but that’s because there isn’t any information about spatial
variability in an average value—it assumes 42.88 percent is everywhere. The non-spatial estimate simply adds up all
of the sample values and divides by the number of samples to get the average
disregarding any geographic pattern.
The spatially-based estimates
comprise the map surface just below the pancake. As described last month, Spatial Interpolation looks at the relative positioning of the
samples values as well as their measure of loan percentage. In this instance the big bumps were
influenced by high measurements in that vicinity while the low areas responded
to surrounding low values.
The map surface in the right
portion of figure 9 compares the two maps by simply subtracting them. The colors were chosen to emphasize the
differences between the whole-field average estimates and the interpolated
ones. The thin yellow band indicates no
difference while the progression of green tones locates areas where the
interpolated map estimated higher values than the average. The progression of red tones identifies the
opposite condition with the average estimate being larger than the interpolated
ones.
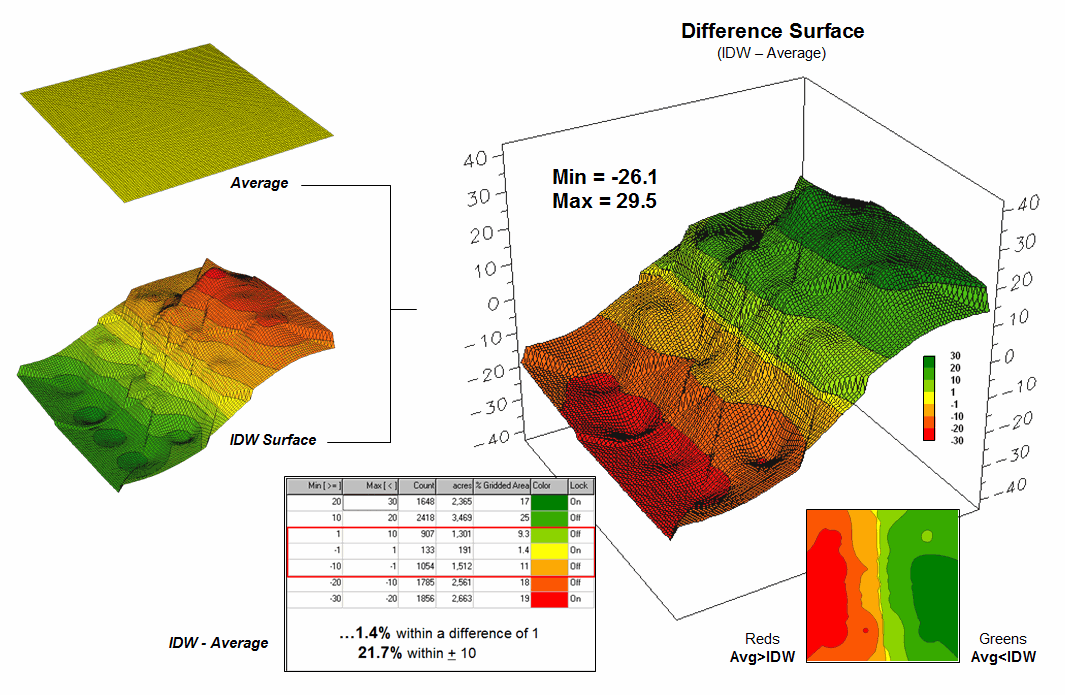
Figure 9. Spatial
comparison of the project area average and the IDW interpolated surface.
The difference between the
two maps ranges from –26.1 to +29.5. If
one assumes that a difference of +/- 10 would not significantly alter a
decision, then about one-quarter of the area (9.3+1.4+11= 21.7%) is adequately
represented by the overall average of the sample data. But that leaves about three-fourths of the
area that is either well-below the average (18 + 19 = 37%) or well-above (25+17
= 42%). The upshot is that using the
average value in either of these areas could lead to poor decisions.
Now turn your attention to
figure 10 that compares maps derived by two different interpolation techniques—IDW
(inverse distance weighted) and Krigging (an advanced spatial statistics
technique using data trends). Note the
similarity in the two surfaces; while subtle differences are visible, the
overall trend of the spatial distribution is similar.
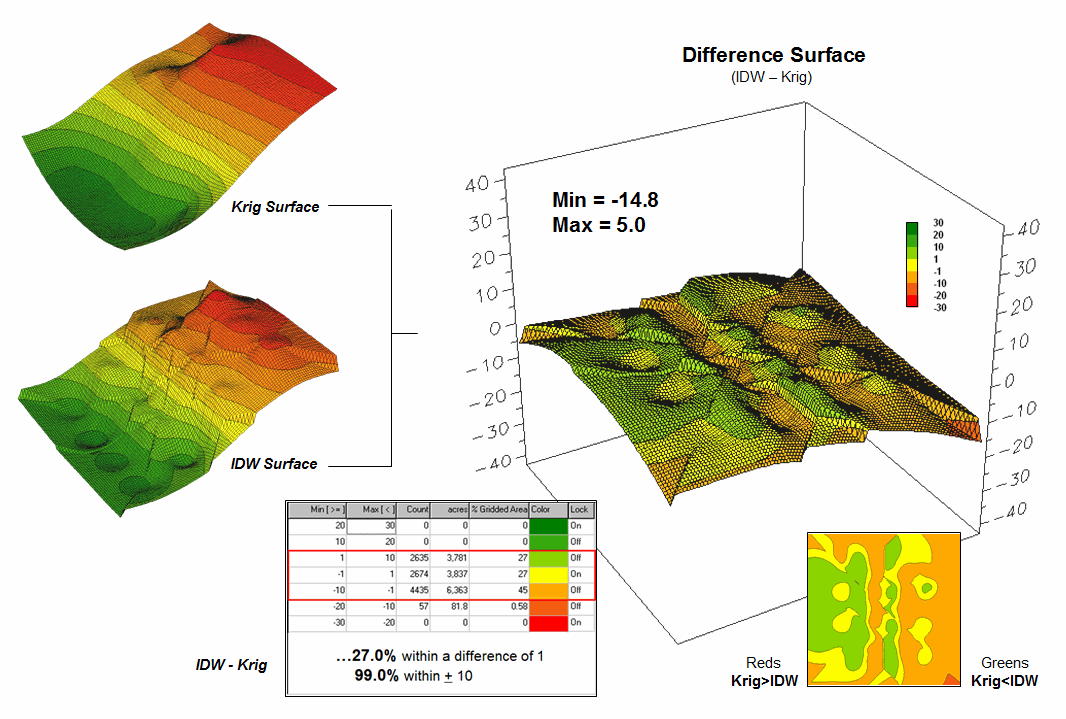
Figure 10.
Spatial comparison of IDW and Krig interpolated surfaces.
The difference map on the
right confirms the similarity between the two map surfaces. The narrow band of yellow identifies areas
that are nearly identical (within +/- 1.0).
The light red locations identify areas where the IDW surface estimates a
bit lower than the Krig ones (within -10); light green a bit higher (within
+10). Applying the same assumption about
“plus/minus 10 difference” being negligible for decision-making, the maps are
effectively the same (99.0%).
So what’s the bottom
line? First, that there are substantial
differences between an arithmetic average and interpolated surfaces. Secondly, that quibbling about the best
interpolation technique isn’t as important as using any interpolated surface
for decision-making.
But which surface best
characterizes the spatial distribution of the sampled data? The answer to this question lies in Residual
Analysis—a technique that investigates the differences between estimated
and measured values throughout an area.
The table in figure 11
reports the results for twelve randomly positioned test samples. The first column identifies the sample ID and
the second column reports the actual measured value for that location. Column C simply depicts the assumption that
the project area average (42.88) represents each of the test locations. Column D computes the difference of the
“estimate minus actual”—formally termed the residual. For example, the first test point (ID#1)
estimated the average of 42.88 but was actually measured as 55.2, so -12.32 is
the residual (42.88 - 55.20= -12.32) …quite a bit off. However, point #6 is a lot better (42.88-49.40=
-6.52).
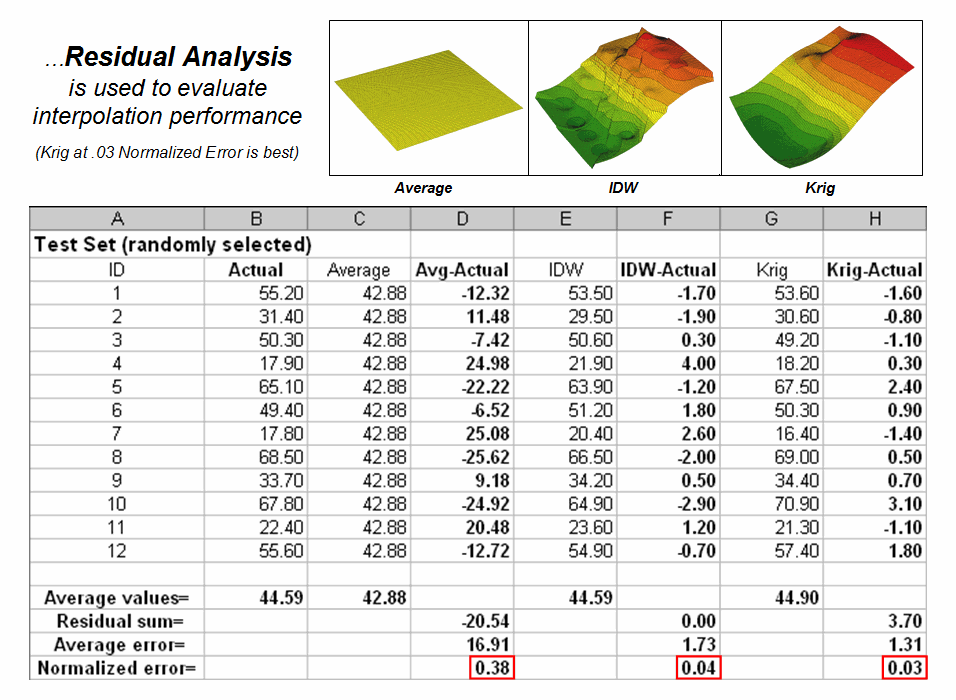
Figure 11. A residual analysis table identifies the
relative performance of average, IDW and Krig estimates.
The residuals for the IDW and
Krig maps are similarly calculated to form columns F and H, respectively. First note that the residuals for the project
area average are considerably larger than either those for the IDW or Krig
estimates. Next note that the residual
patterns between the IDW and Krig are very similar—when one is off, so is the
other and usually by about the same amount.
A notable exception is for test point #4 where the IDW estimate is
dramatically larger.
The rows at the bottom of the
table summarize the residual analysis results.
The Residual Sum characterizes
any bias in the estimates—a negative value indicates a tendency to
underestimate with the magnitude of the value indicating how much. The –20.54 value for the whole-field average
indicates a relatively strong bias to underestimate.
The Average Error reports how typically far off the estimates
were. The 16.91 figure for area average
is about ten times worse than either IDW (1.73) or Krig (1.31). Comparing the figures to the assumption that
a plus/minus10 difference is negligible in decision-making, it is apparent that
1) the project area average is inappropriate and that 2) the accuracy
differences between IDW and Krig are very minor.
The Normalized Error simply calculates the average error as a
proportion of the average value for the test set of samples (1.73/44.59= 0.04
for IDW). This index is the most useful
as it allows you to compare the relative map accuracies between different
maps. Generally speaking, maps with
normalized errors of more than .30 are suspect and one might not want to use them
for important decisions.
So what’s the bottom-bottom
line? That Residual Analysis is an
important component of geo-business data analysis. Without an understanding of the relative
accuracy and interpolation error of the base maps, one cannot be sure of the
recommendations and decisions derived from the interpolated data. The investment in a few extra sampling points
for testing and residual analysis of these data provides a sound foundation for
business decisions. Without it, the
process becomes one of blind faith and wishful thinking with colorful maps.
Characterizing Data Groups
One of the most fundamental techniques in map
analysis is the comparison of a set of maps.
This usually involves staring at some side-by-side map displays and
formulating an impression about how the colorful patterns do and don’t appear
to align.
But just how similar is one location to
another? Really similar, or just a
little bit similar? And just how
dissimilar are all of the other areas?
While visual (visceral?) analysis can identify broad relationships, it
takes quantitative map analysis to generate the detailed scrutiny demanded by
most Geo-business applications.
Consider the three maps shown in figure 12— what
areas identify similar data patterns? If
you focus your attention on a location in the southeastern portion, how similar
are all of the other locations? Or how
about a northeastern section? The
answers to these questions are far too complex for visual analysis and
certainly beyond the geo-query and display procedures of standard desktop
mapping packages.
The mapped data in the example show the geographic
patterns of housing density, value and age for a project area. In visual analysis you move your focus among
the maps to summarize the color assignments (2D) or relative surface height
(3D) at different locations. In the
southeastern portion the general pattern appears to be low Density, high Value
and low Age— low, high, low. The
northeastern portion appears just the opposite—high, low, high.
The difficulty in visual analysis is two-fold—
remembering the color patterns and calculating the difference. Quantitative map analysis does the same thing
except it uses the actual map values in place of discrete color bands. In addition, the computer doesn’t tire as
easily as you and completes the comparison throughout an entire map window in a
second or two (10,000 grid cells in this example).
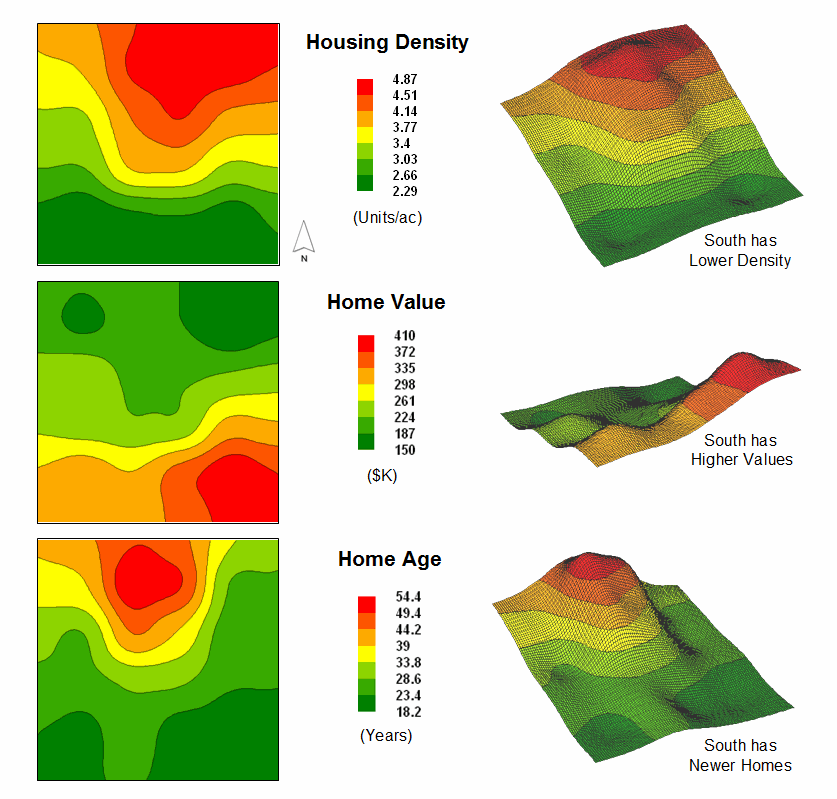
Figure 12. Map surfaces identifying the spatial
distribution of housing density, value and age.
The upper-left portion of figure 13 illustrates
capturing the data patterns for comparing two map locations. The “data spear” at Point #1 identifies the
housing Density as 2.4 units/ac, Value as $407,000 and Age as 18.3 years. This step is analogous to your eye noting a
color pattern of green, red, and green.
The other speared location at Point #2 locates the least similar data
pattern with housing Density of 4.8 units/ac, Value of $190,000 and Age of 51.2
years— or as your eye sees it, a color pattern of red, green, red.
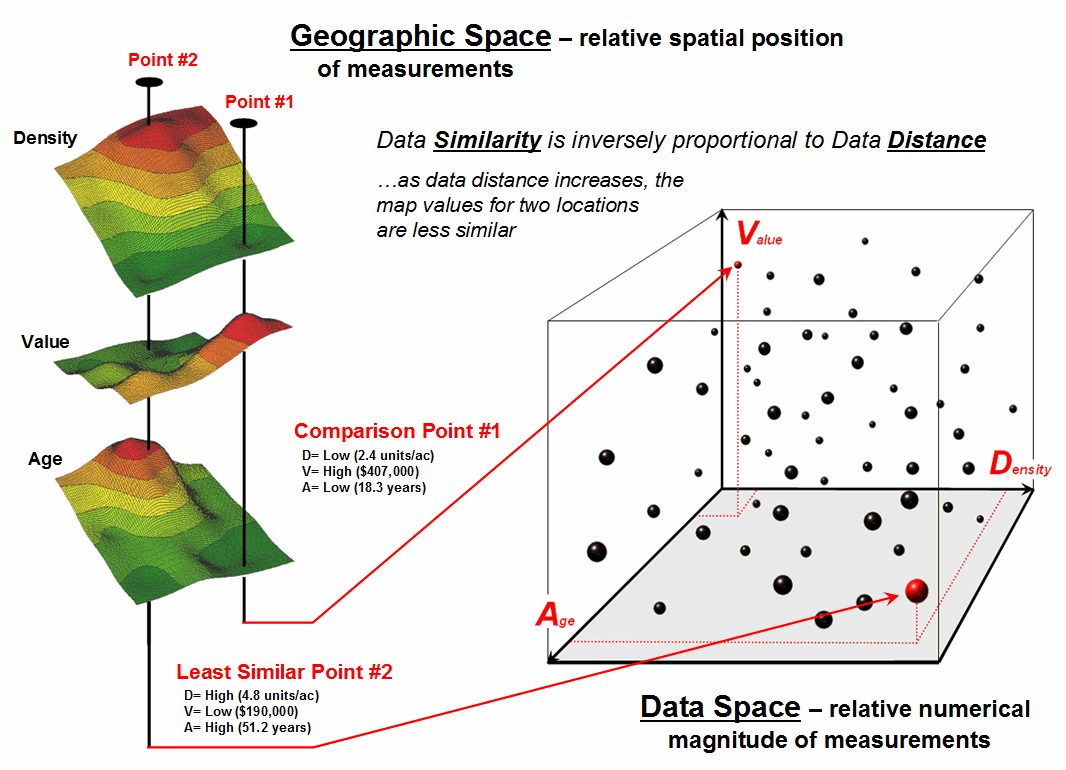
Figure 13. Conceptually linking geographic space and data
space.
The right side of the figure schematically depicts
how the computer determines similarity in the data patterns by analyzing them
in three-dimensional “data space.”
Similar data patterns plot close to one another with increasing distance
indicating decreasing similarity. The
realization that mapped data can be expressed in both geographic space and data
space is paramount to understanding how a computer quantitatively analyses
numerical relationships among mapped data.
The right side of the figure schematically depicts
how the computer determines similarity in the data patterns by analyzing them
in three-dimensional “data space.”
Similar data patterns plot close to one another with increasing distance
indicating decreasing similarity. The realization
that mapped data can be expressed in both geographic space and data space is
paramount to understanding how a computer quantitatively analyses numerical
relationships among mapped data.
Geographic space
uses earth coordinates, such as latitude and longitude, to locate things in the
real world. The geographic expression of
the complete set of measurements depicts their spatial distribution in familiar
map form. Data space, on the other hand, is a bit less familiar. While you can’t stroll through data space you
can conceptualize it as a box with a bunch of balls floating within it.
In the example, the three axes defining the extent
of the box correspond to housing Density (D), Value (V) and Age (A). The floating balls represent data patterns of
the grid cells defining the geographic space—one “floating ball” (data point)
for each grid cell. The data values
locating the balls extend from the data axes—2.4, 407.0 and 18.3 for the comparison
point identified in figure 2. The
other point has considerably higher values in D and A with a much lower V
values so it plots at a different location in data space (4.8, 51.2 and 190.0
respectively).
The bottom line for data space analysis is that the
position of a point in data space identifies its numerical pattern—low, low,
low in the back-left corner, and high, high, high in the upper-right corner of
the box. Points that plot in data space
close to each other are similar; those that plot farther away are less
similar. Data distance is the way
computers “see” what you see in the map displays. The real difference in the graphical and
quantitative approaches is in the details—the tireless computer “sees” subtle
differences between all of the data points and can generate a detailed map of
similarity.
In the example in figure 13, the floating ball
closest to you is least similar—greatest “data distance” from the comparison
point. This distance becomes the
reference for “most different” and sets the bottom value of the similarity
scale (0% similar). A point with an
identical data pattern plots at exactly the same position in data space
resulting in a data distance of 0 equating to the highest similarity value
(100% similar).
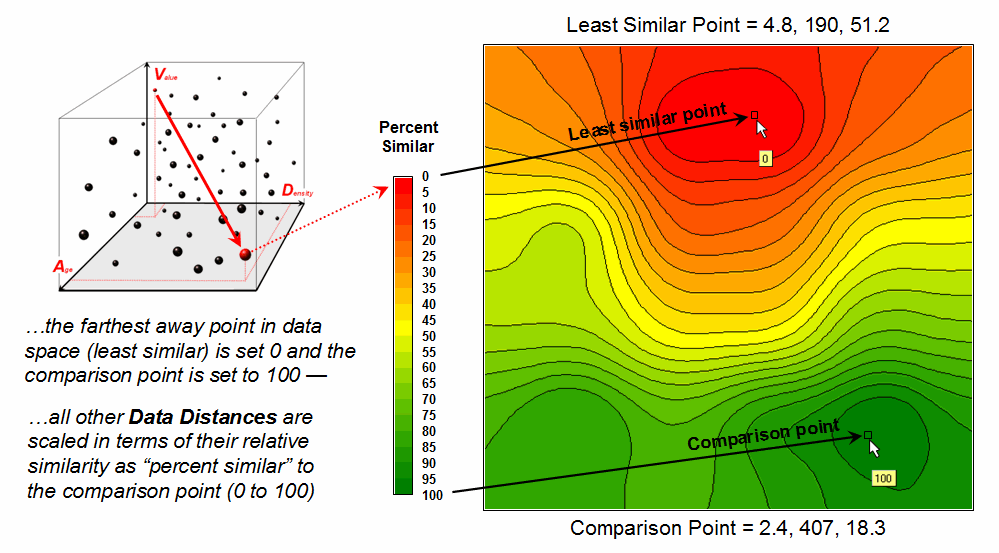
Figure 14. A similarity map identifies how related
locations are to a given point.
The similarity map shown in figure 14 applies a
consistent scale to the data distances calculated between the comparison point
and all of the other points. The green
tones indicate locations having fairly similar D, V and A levels to the
comparison location—with the darkest green identifying locations with an
identical data pattern (100% similar).
It is interesting to note that most of the very similar locations are in
the southern portion of the project area.
The light-green to red tones indicate increasingly dissimilar areas
occurring in the northern portion of the project area.
A similarity map can be an extremely valuable tool
for investigating spatial patterns in a complex set of mapped data. The similarity calculations can handle any
number of input maps, yet humans are unable to even conceptualize more than
three variables (data space box). Also,
the different map layers can be weighted to reflect relative importance in
determining overall similarity. For
example, housing Value could be specified as ten times more important in
assessing similarity. The result would
be a different map than the one shown in figure 14— how different depends on
the unique coincidence and weighting of the data patterns themselves.
In effect, a similarity map replaces a lot of
general impressions and subjective suggestions for comparing maps with an
objective similarity measure assigned to each map location. The technique moves map analysis well beyond
traditional visual/visceral map interpretation by transforming digital map
values into to a quantitative/consistent index of percent similarity. Just click on a location and up pops a map
that shows how similar every other location is to the data pattern at the
comparison point— an unbiased appraisal of similarity.
Identifying Data Zones
The previous section introduced the concept of Data
Distance as a means to measure data pattern similarity within a stack of
map layers. One simply mouse-clicks on a
location, and all of the other locations are assigned a similarity value from 0
(zero percent similar) to 100 (identical) based on a set of specified map
layers. The statistic replaces difficult
visual interpretation of a series of side-by-side map displays with an exact
quantitative measure of similarity at each location.
An extension to the technique allows you to circle
an area then compute similarity based on the typical data pattern within the
delineated area. In this instance, the
computer calculates the average value within the area for each map layer to
establish the comparison data pattern, and then determines the normalized data
distance for each map location. The
result is a map showing how similar things are throughout a project area to the
area of interest.
The link between Geographic Space and Data
Space is the keystone concept. As
shown in figure 15, spatial data can be viewed as either a map, or a
histogram. While a map shows us “where
is what,” a histogram summarizes “how often” data values occur
(regardless where they occur). The
top-left portion of the figure shows a 2D/3D map display of the relative
housing density within a project area.
Note that the areas of high housing Density along the northern edge
generally coincide with low home Values.
The histogram in the center of the figure depicts a
different perspective of the data.
Rather than positioning the measurements in geographic space it
summarizes the relative frequency of their occurrence in data space. The X-axis of the graph corresponds to the
Z-axis of the map—relative level of housing Density. In this case, the spikes in the graph
indicate measurements that occur more frequently. Note the relatively high occurrence of
density values around 2.6 and 4.7 units per acre. The left portion of the figure identifies the
data range that is unusually high (more than one standard deviation above the
mean; 3.56 + .80 = 4.36 or greater) and mapped onto the surface as the peak in
the NE corner. The lower sequence of
graphics in the figure depicts the histogram and map that identify and locate
areas of unusually low home values.
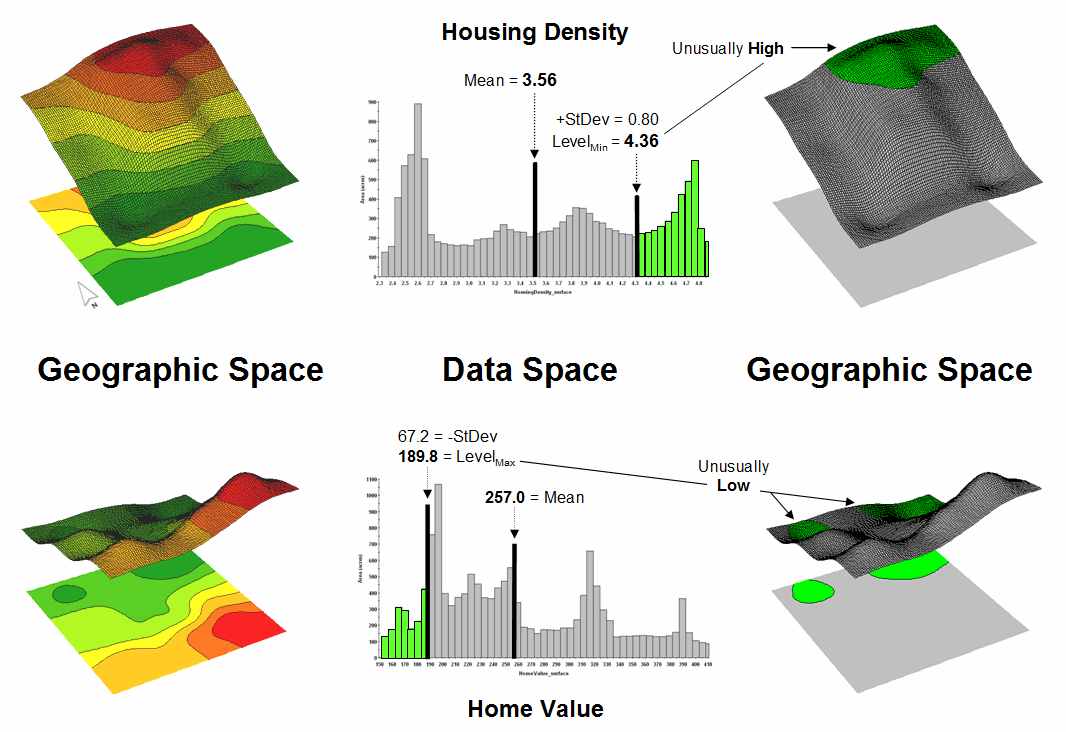
Figure 15. Identifying areas of unusually high
measurements.
Figure 16 illustrates combining the housing Density
and Value data to locate areas that have high measurements in both. The graphic in the center is termed a Scatter
Plot that depicts the joint occurrence of both sets of mapped data. Each ball in the scatter plot schematically
represents a location in the field. Its
position in the scatter plot identifies the housing Density and home Value
measurements for one of the map locations—10,000 in all for the actual example
data set. The balls shown in the light
green shaded areas of the plot identify locations that have high Density or
low Value; the bright green area in the upper right corner of the plot
identifies locations that have high Density and low Value.
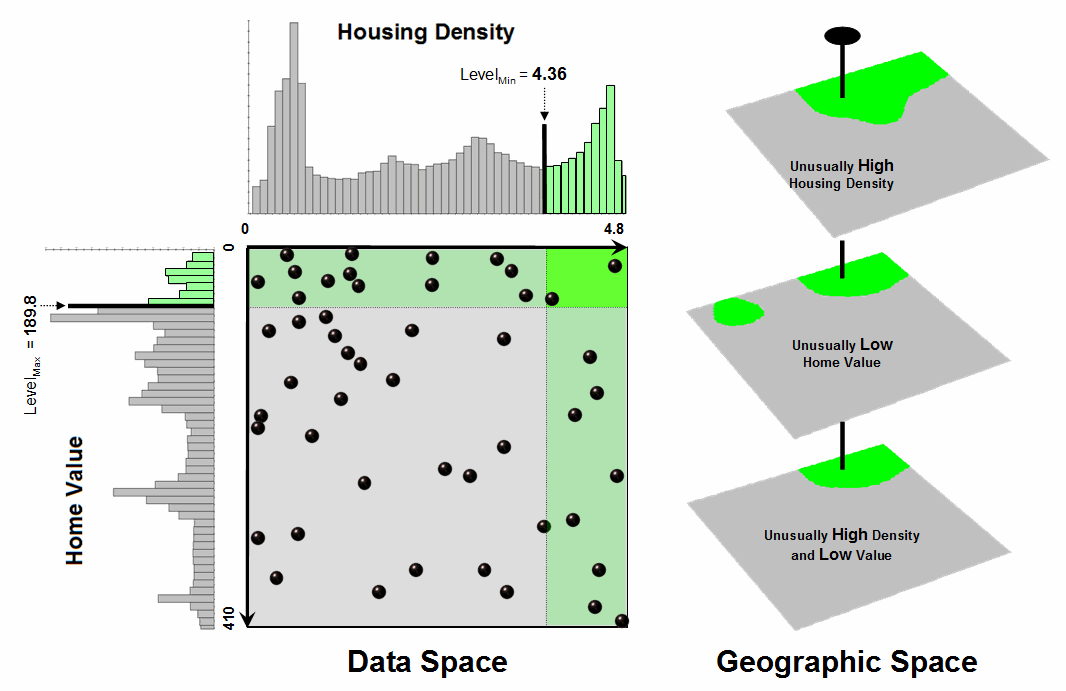
Figure 16. Identifying joint coincidence in both data
and geographic space.
The aligned maps on the right side of figure 16
show the geographic solution for the high D and low V areas. A simple map-ematical way to generate
the solution is to assign 1 to all locations of high Density and Value map
layers (green). Zero (grey) is assigned
to locations that fail to meet the conditions.
When the two binary maps (0 and1) are multiplied, a zero on either map
computes to zero. Locations that meet
the conditions on both maps equate to one (1*1 = 1). In effect, this “level-slice” technique
locates any data pattern you specify—just assign 1 to the data interval of
interest for each map variable in the stack, and then multiply.
Figure 17 depicts level slicing for areas that are
unusually low housing Density, high Value and low Age. In this instance the data pattern coincidence
is a box in 3-dimensional scatter plot space (upper-right corner toward the
back). However a slightly different map-ematical
trick was employed to get the detailed map solution shown in the figure.
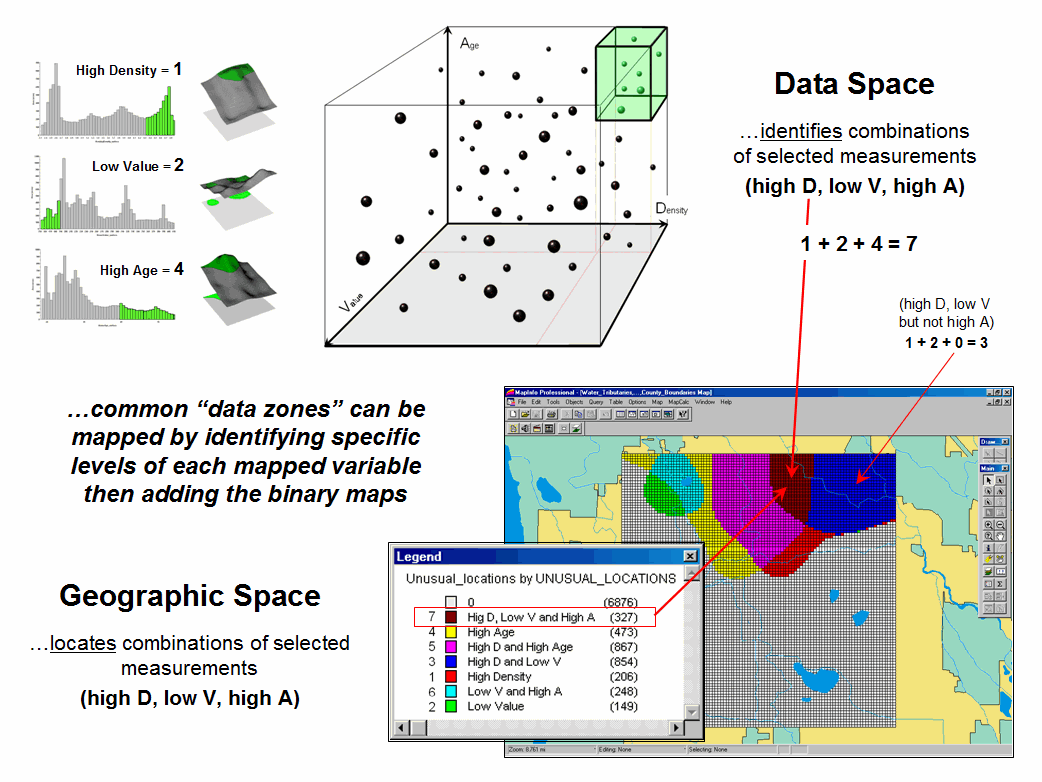
Figure 17. Level-slice classification using three map
variables.
On the individual maps, areas of high Density were
set to D= 1, low Value to V= 2 and high Age to A= 4, then the binary map layers
were added together. The result is a range
of coincidence values from zero (0+0+0= 0; gray= no coincidence) to seven
(1+2+4= 7; dark red for location meeting all three criteria). The map values in between identify the areas
meeting other combinations of the conditions.
For example, the dark blue area contains the value 3 indicating high D
and low V but not high A (1+2+0= 3) that represents about three percent of the
project area (327/10000= 3.27%). If four
or more map layers are combined, the areas of interest are assigned increasing
binary progression values (…8, 16, 32, etc)—the sum will always uniquely
identify all possible combinations of the conditions specified.
While level-slicing isn’t a very sophisticated
classifier, it illustrates the usefulness of the link between Data Space and Geographic
Space to identify and then map unique combinations of conditions in a set of
mapped data. This fundamental concept
forms the basis for more advanced geo-statistical analysis—including map
clustering that will be the focus of next section.
Mapping Data Clusters
The last couple of
sections have focused on analyzing data similarities within a stack of
maps. The first technique, termed Map
Similarity, generates a map showing how similar all other areas are to a
selected location. A user simply clicks
on an area and all of the other map locations are assigned a value from zero
(0% similar—as different as you can get) to one hundred (100% similar—exactly
the same data pattern).
The other technique, Level
Slicing, enables a user to specify a data range of interest for each map
layer in the stack then generate a map identifying the locations meeting the
criteria. Level Slice output identifies
combinations of the criteria met—from only one criterion (and which one it is),
to those locations where all of the criteria are met.
While both of these
techniques are useful in examining spatial relationships, they require the user
to specify data analysis parameters. But
what if you don’t know which locations in a project area warrant Map Similarity
investigation or what Level Slice intervals to use? Can the computer on its own identify groups
of similar data? How would such a
classification work? How well would it
work?
Figure 18 shows some
example spatial patterns derived from Map Clustering. The “floating” map layers on the left show
the input map stack used for the cluster analysis. The maps are the same ones used in previous
examples and identify the geographic and numeric distributions of housing Density,
home Value and home Age levels throughout the example project area.
Figure
18. Example output from map clustering.
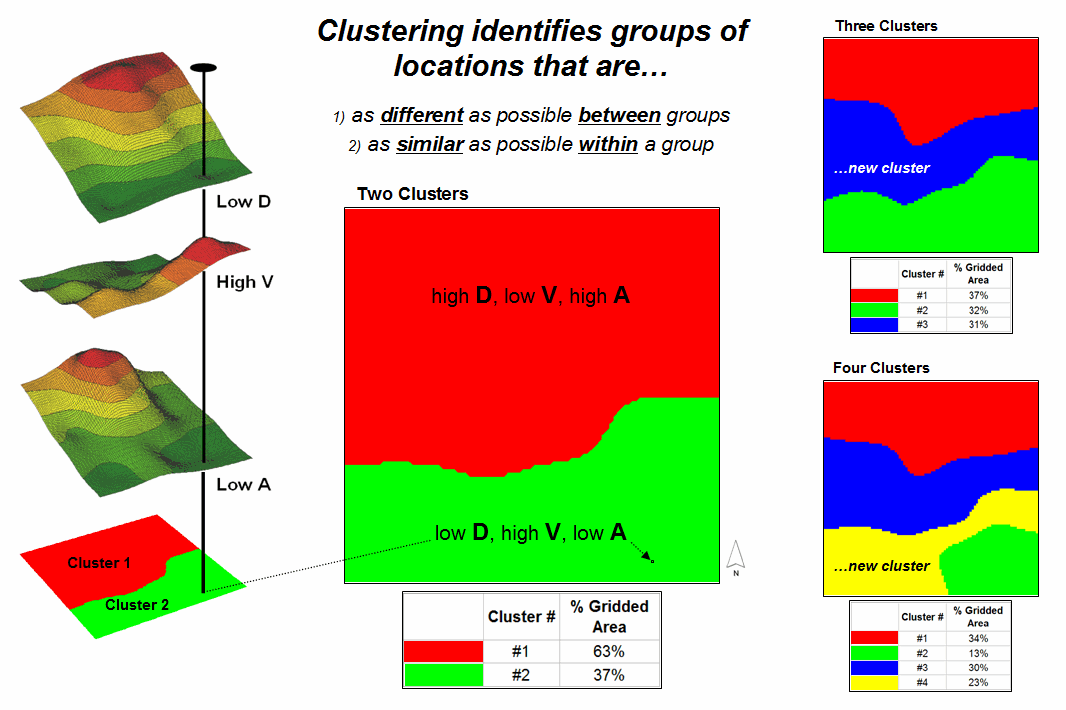
The map in the center of
the figure shows the results of classifying the D, V and A map stack into two
clusters. The data pattern for each cell
location is used to partition the field into two groups that are 1) as different
as possible between groups and 2) as similar as possible within
a group. If all went well, any other
division of the mapped data into two groups would be worse at mathematically balancing
the two criteria.
The two smaller maps on
the right show the division of the data set into three and four clusters. In all three of the cluster maps, red is
assigned to the cluster with relatively high Density, low Value and high Age
responses (less wealthy) and green to the one with the most opposite conditions
(wealthy areas). Note the encroachment
at the margin on these basic groups by the added clusters that are formed by
reassigning data patterns at the classification boundaries. The procedure is effectively dividing the
project area into “data neighborhoods” based on relative D, V and A values
throughout the map area. Whereas
traditional neighborhoods usually are established by historical legacy, cluster
partitions respond to similarity of mapped data values and can be useful in
establishing insurance zones, sales areas and marketing clusters.
The mechanics of
generating cluster maps are quite simple.
Just specify the input maps and the number of clusters you want then
miraculously a map appears with discrete data groupings. So how is this miracle performed? What happens inside clustering’s black box?
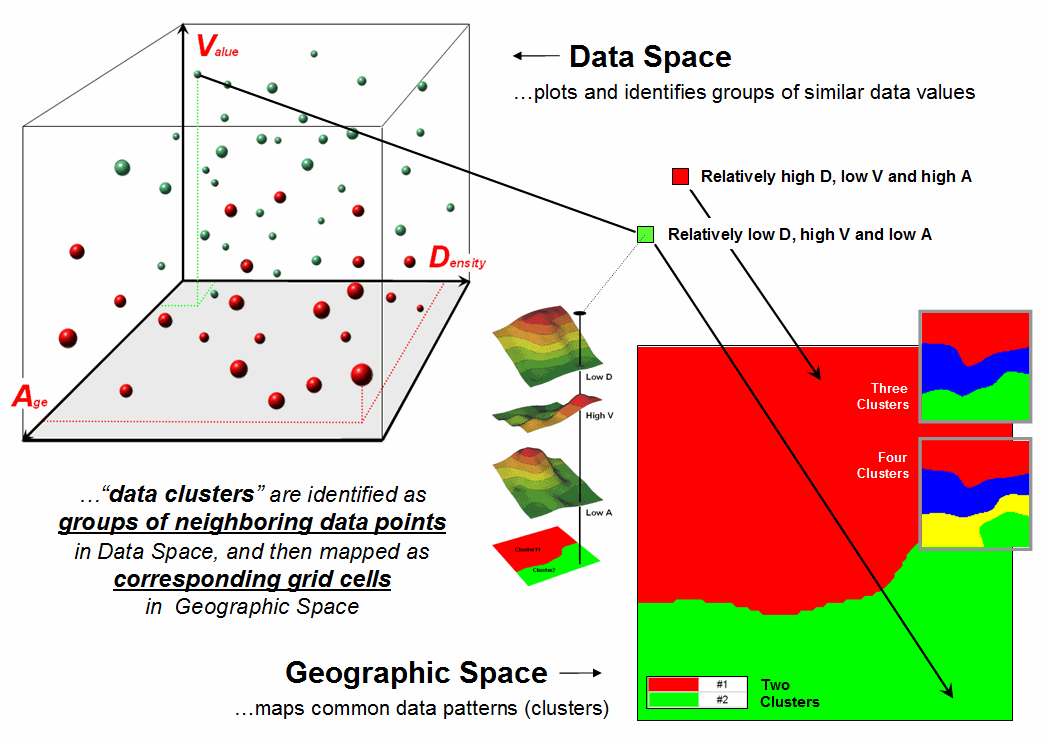
Figure
19. Data patterns for map locations are
depicted as floating balls in data space with groups of nearby patterns
identifying data clusters.
The schematic in figure
19 depicts the process. The floating balls
identify the data pattern for each map location (in Geographic Space) plotted
against the P, K and N axes (in Data Space).
For example, the tiny green ball in the upper-right corner corresponds
to a map location in the wealthiest part of town (low D, high V and low
A). The large red ball appearing closest
depicts a location in a less wealthy part (high D, low V and high A). It seems sensible that these two extreme
responses would belong to different data groupings (clusters 1 and 2,
respectively).
While the specific
algorithm used in clustering is beyond the scope of this discussion (see
author’s note), it suffices to recognize that data distances between the
floating balls are used to identify cluster membership— groups of balls that
are relatively far from other groups (different between groups) and
relatively close to each other (similar within a group) form separate data
clusters. In this example, the red balls
identify relatively less wealthy locations while green ones identify wealthier
locations. The geographic pattern of the
classification (wealthier in the south) is shown in the 2D maps in the lower
right portion of the figure.
Identifying groups of
neighboring data points to form clusters can be tricky business. Ideally, the clusters will form distinct
“clouds” in data space. But that rarely
happens and the clustering technique has to enforce decision rules that slice a
boundary between nearly identical responses.
Also, extended techniques can be used to impose weighted boundaries based
on data trends or expert knowledge.
Treatment of categorical data and leveraging spatial autocorrelation are
additional considerations.
So how do know if the
clustering results are acceptable? Most
statisticians would respond, “…you can’t tell for sure.” While there are some elaborate procedures
focusing on the cluster assignments at the boundaries, the most frequently used
benchmarks use standard statistical indices, such as T- and F-statistics used
in comparing sample populations.
Figure 20 shows the
performance table and box-and-whisker plots for the map containing two data
clusters. The average, standard
deviation, minimum and maximum values within each cluster are calculated. Ideally the averages between the two clusters
would be radically different and the standard deviations small—large difference
between groups and small differences within groups.
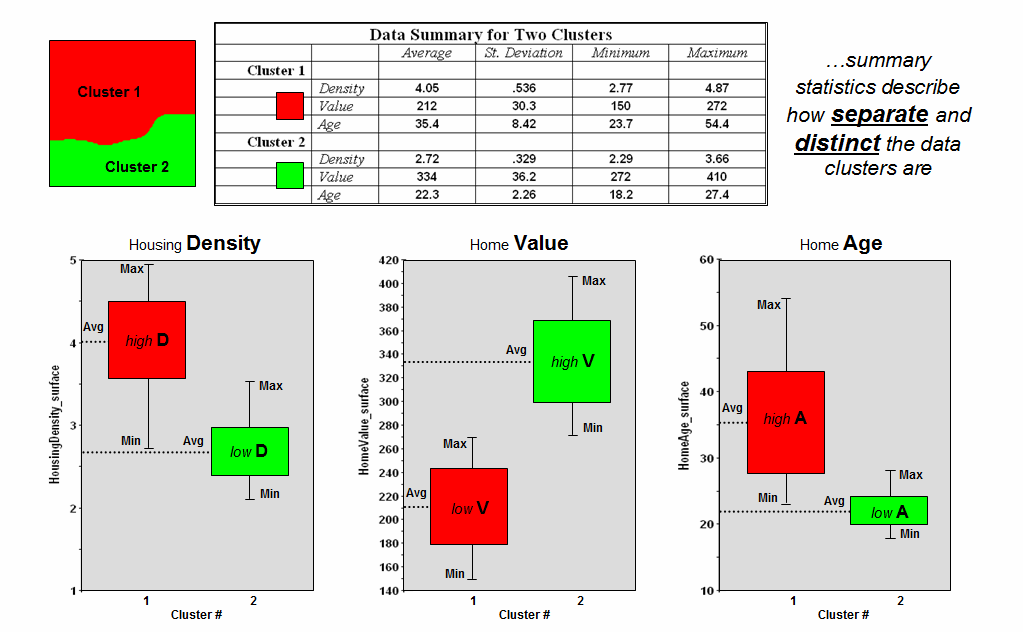
Figure
20. Clustering results can be evaluated
using “box and whisker” diagrams and basic statistics.
Box-and-whisker plots
enable us to visualize these differences.
The box is aligned on the Average (center of the box) and extends above
and below one Standard Deviation (height of the box) with the whiskers drawn to
the minimum and maximum values to provide a visual sense of the data range. If the plots tend to overlap a great deal, it
suggests that the clusters are not very distinct and indicates significant
overlapping of data patterns between clusters.
The separation between
the boxes in all three of the data layers of the example suggests good
distinction between the two clusters with the Home Value grouping the best with
even the Min/Max whiskers not overlapping.
Given the results, it appears that the clustering classification in the
example is acceptable… and hopefully the statisticians among us will accept in advance
my apologies for such an introductory and visual treatment of a complex topic.
Mapping the Future
For years non-spatial statistics has been
predicting things by analyzing a sample set of data for a numerical
relationship (equation) then applying the relationship to another set of
data. The drawbacks are that a
non-spatial approach doesn’t account for geographic patterns and the result is
just summary of the overall relationship for an entire project area.
Extending predictive analysis to mapped data seems
logical as maps at their core are just organized sets of numbers and the GIS
toolbox enables us to link the numerical and geographic distributions of the
data. The past several columns have
discussed how the computer can “see” spatial data relationships including
“descriptive techniques” for assessing map similarity, data zones,
and clusters. The next logical
step is to apply “predictive techniques” that generates mapped forecasts of
conditions for other areas or time periods.
To illustrate the process, suppose a bank has a
database of home equity loan accounts they have issued over several
months. Standard geo-coding techniques
are applied to convert the street address of each sale to its geographic
location (latitude, longitude). In turn,
the geo-tagged data is used to “burn” the account locations into an analysis
grid as shown in the lower left corner of figure 21. A roving window is used to derive a Loan
Concentration surface by computing the number of accounts within a specified
distance of each map location. Note the
spatial distribution of the account density— a large pocket of accounts in the
southeast and a smaller one in the southwest.
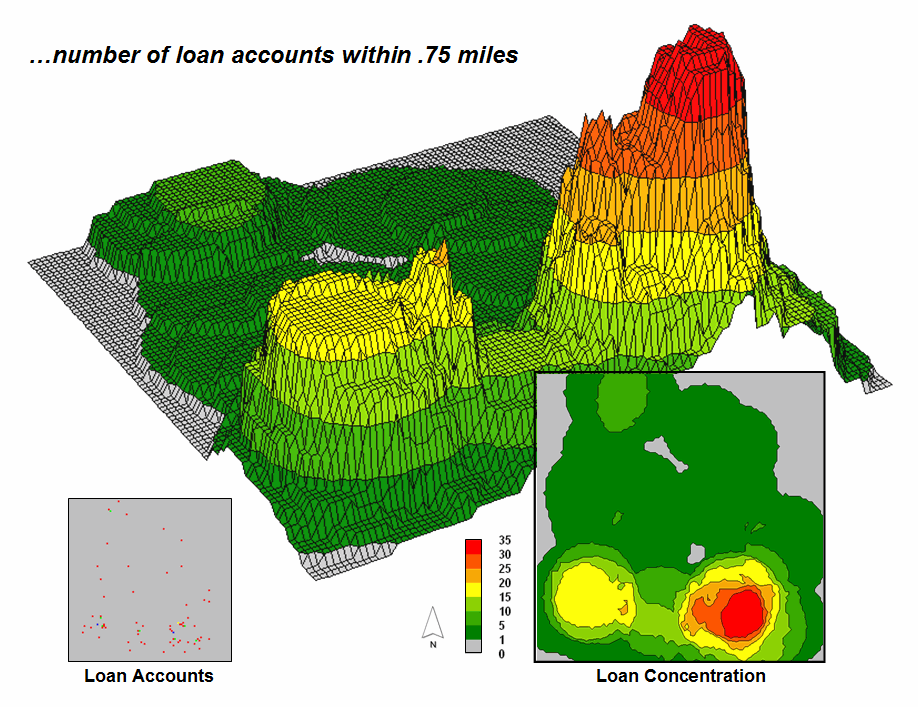
Figure 21. A loan concentration surface is created by
summing the number of accounts for each map location within a specified
distance.
The most frequently used method for establishing a quantitative
relationship among variables involves Regression. It is beyond the scope of this column to
discuss the underlying theory of regression; however in a conceptual nutshell,
a line is “fitted” in data space that balances the data so the differences from
the points to the line (termed the residuals) are minimized and the sum of the
differences is zero. The equation of the
best-fitted line becomes a prediction equation reflecting the spatial
relationships among the map layers.
To illustrate predictive modeling, consider the
left side of figure 22 showing four maps involved in a regression
analysis. The loan Concentration surface
at top is serves as the Dependent Map Variable (to be predicted). The housing Density, Value, and Age surfaces
serve as the Independent Map Variables (used to predict). Each grid cell contains the data values used
to form the relationship. For example,
the “pin” in the figure identifies a location where high loan Concentration
coincides with a low housing Density, high Value and low Age response
pattern.
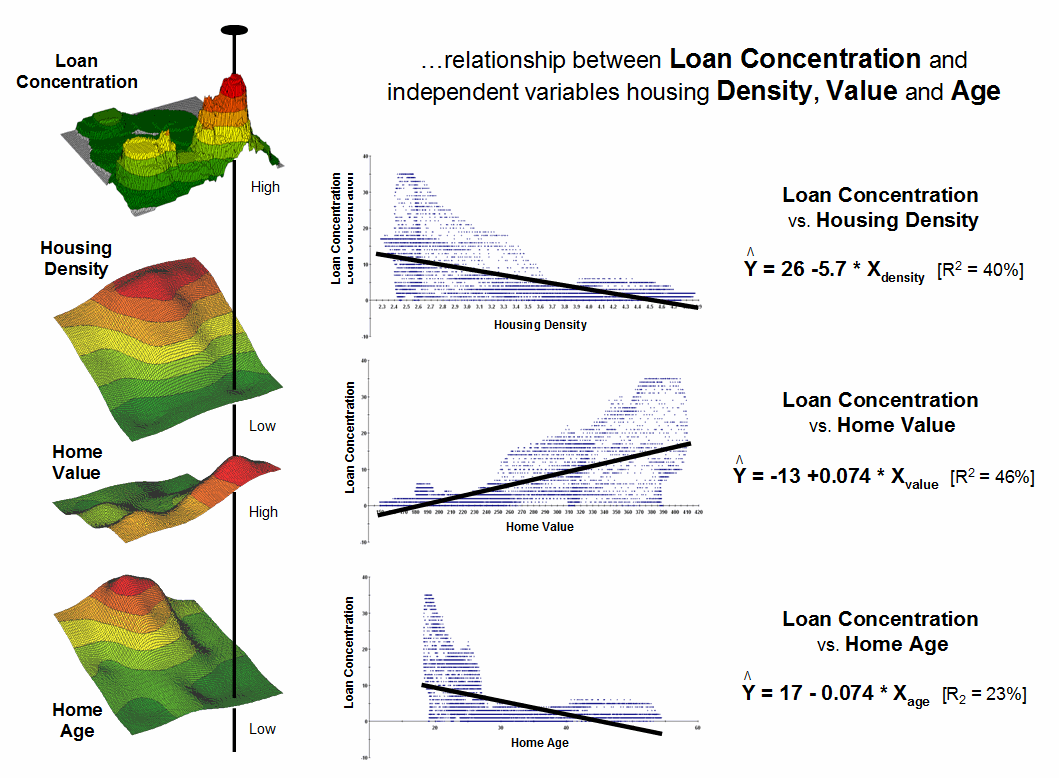
Figure 22. Scatter plots and regression results relate
Loan Density to three independent variables (housing Density, Value and Age).
The scatter plots in the center of the figure
graphically portray the consistency of the relationships. The Y axis tracks the dependent variable
(loan Concentration) in all three plots while the X axis follows the independent
variables (housing Density, Value, and Age).
Each plotted point represents the joint condition at one of the grid
locations in the project area—10,000 dots in each scatter plot. The shape and orientation of the cloud of
points characterizes the nature and consistency of the relationship between the
two map variables.
A plot of a perfect relationship would have all of
the points forming a line. An upward
directed line indicates a positive correlation where an increase in X
always results in a corresponding increase in Y. A downward directed line indicates a
negative correlation with an increase in X resulting in a
corresponding decrease in Y. The slope
of the line indicates the extent of the relationship with a 45-degree slope
indicating a 1-to-1 unit change. A
vertical or horizontal line indicates no correlation— a change in one
variable doesn’t affect the other.
Similarly, a circular cloud of points indicates there isn’t any
consistency in the changes.
Rarely does the data plot into these ideal
conditions. Most often they form
dispersed clouds like the scatter plots in figure 22. The general trend in the data cloud indicates
the amount and nature of correlation in the data set. For example, the loan Concentration vs.
housing Density plot at the top shows a large dispersion at the lower housing
Density ranges with a slight downward trend.
The opposite occurs for the relationship with housing Value (middle
plot). The housing Age relationship
(bottom plot) is similar to that of housing Density but the shape is more
compact.
Regression is used to quantify the trend in the
data. The equations on the right side of
figure 22 describe the “best-fitted” line through the data clouds. For example, the equation Y= 26.0 – 5.7X
relates loan Concentration and housing Density.
The loan Concentration can be predicted for a map location with a
housing Density of 3.4 by evaluating Y= 26.0 – (5.7 * 3.4) = 6.62 accounts
estimated within .75 miles. For
locations where the prediction equation drops below 0 the prediction is set to
0 (infeasible negative accounts beyond housing densities of 4.5).
The “R-squared index” with the regression equation
provides a general measure of how good the predictions ought to be— 40%
indicates a moderately weak predictor. If
the R-squared index was 100% the predicting equation would be perfect for the
data set (all points directly falling on the regression line). An R-squared index of 0% indicates an
equation with no predictive capabilities.
In a similar manner, the other independent
variables (housing Value and Age) can be used to derive a map of expected loan
Concentration. Generally speaking it
appears that home Value exhibits the best relationship with loan Concentration
having an R-squared index of 46%. The
23% index for housing Age suggests it is a poor predictor of loan
Concentration.
Multiple regression can be used to simultaneously
consider all three independent map variables as a means to derive a better
prediction equation. Or more
sophisticated modeling techniques, such as Non-linear Regression and
Classification and Regression Tree (CART)
methods, can be used that often results in an R-squared index exceeding 90%
(nearly perfect).
The bottom line is that predictive modeling using
mapped data is fueling a revolution in sales forecasting. Like parasailing on a beach, spatial data
mining and predictive modeling are affording an entirely new perspective of
geo-business data sets and applications by linking data space and geographic
space through grid-based map analysis.
Mapping Potential Sales
My first sojourn into geo-business involved an
application to extend a test marketing project for a new phone product
(nick-named “teeny-ring-back”) that enabled two phone numbers with distinctly different
rings to be assigned to a single home phone—one for the kids and one for the
parents. This pre-Paleolithic project
was debuted in 1991 when phones were connected to a wall by a pair of copper
wires and street addresses for customers could be used to geo-code the actual
point of sale/use. Like pushpins on a
map, the pattern of sales throughout the city emerged with some areas doing
very well (high sales areas), while in other areas sales were few and far between
(low sales areas).
The assumption of the project was that a
relationship existed between conditions throughout the city, such as income
level, education, number in household, etc. could help explain sales
pattern. The demographic data for the
city was analyzed to calculate a prediction equation between product sales and
census data.
The prediction equation derived from test market
sales in one city could be applied to another city by evaluating exiting
demographics to “solve the equation” for a predicted sales map. In turn, the predicted sales map was combined
with a wire-exchange map to identify switching facilities that required
upgrading before release of the product in the new city. Although GIS systems were crude at the time,
the project was deemed a big success.
Now fast-forward to more contemporary times. A GeoWorld feature article described a
similar, but much more thorough analysis of retail sales competition (Beyond
Location, Location, Location: Retail Sales Competition Analysis, www.innovativegis.com/basis/present/GW06_retail/GW06_Retail.htm;
GeoWorld, March 2006). Figure 23
outlines the steps for determining competitive advantage for various store
locations.
Most
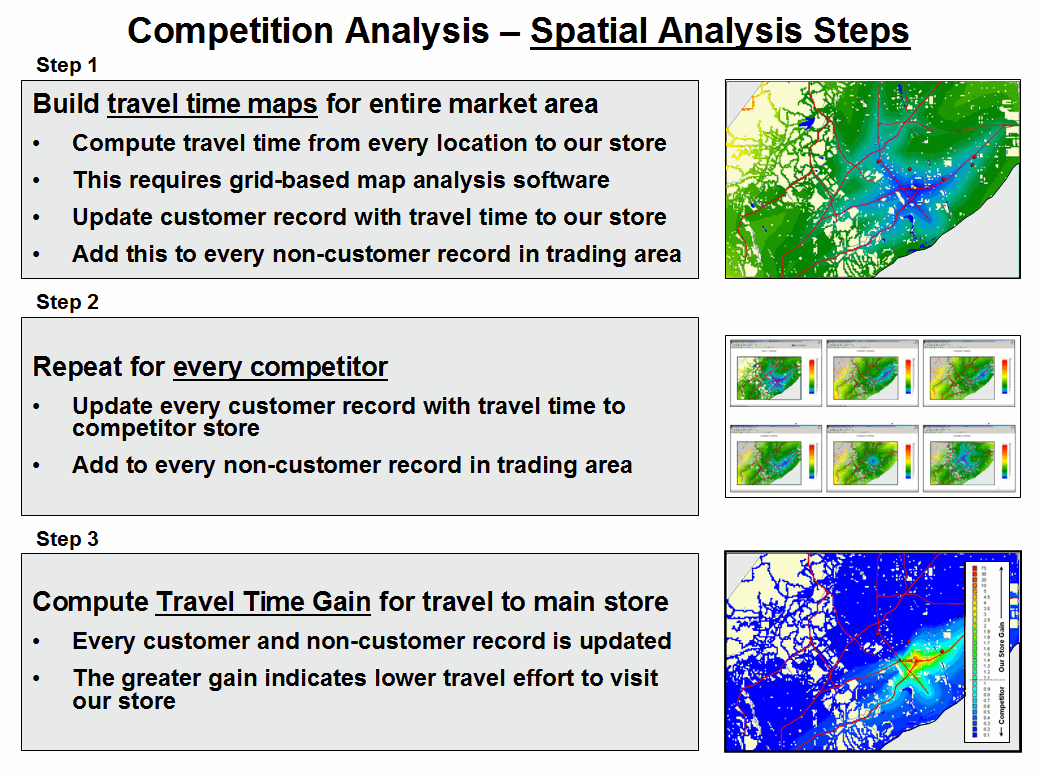
Figure 23. Spatial Modeling
steps derive the relative travel time relationships for our store and each of
the competitor stores for every location in the project area and links this
information to customer records.
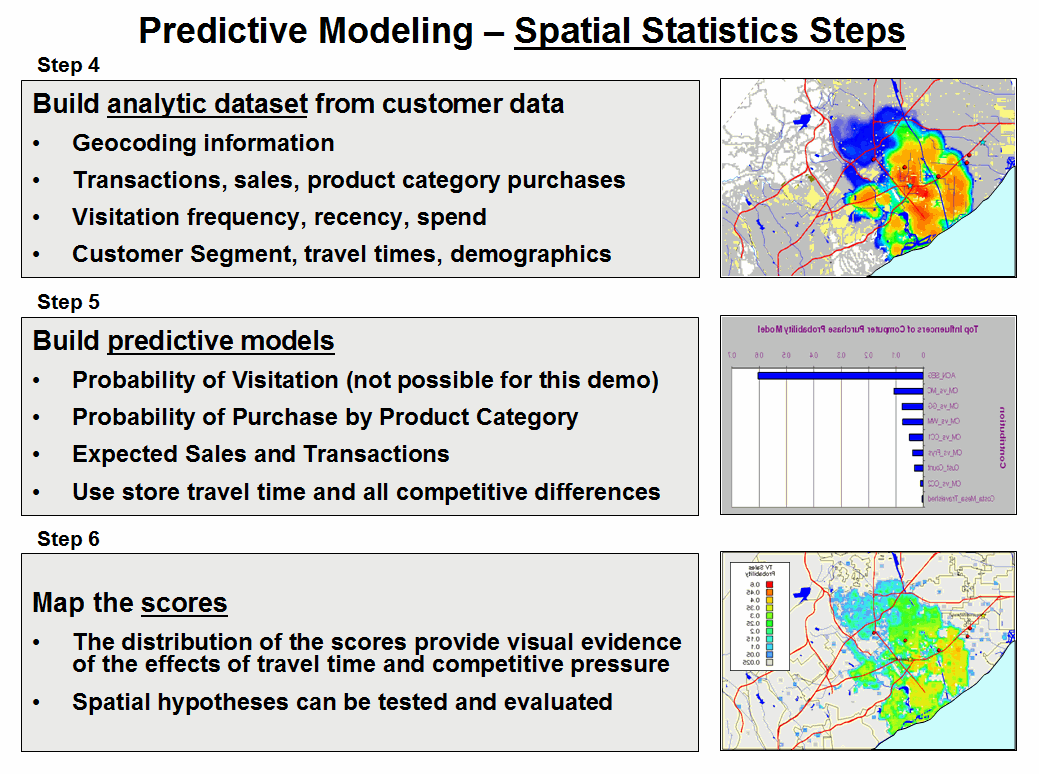
Figure 24. Predictive Modeling steps use spatial data
mining procedures for relating spatial and non-spatial factors to sales data to
derive maps of expected sales for various products.
Step 1 map shows the grid-based solution for
travel-time from “Our Store” to all other grid locations in the project
area. The blue tones identify grid cells
that are less than twelve minutes away assuming travel on the highways is four
times faster than on city streets. Note
the star-like pattern elongated around the highways and progressing to the
farthest locations (warmer tones). In a
similar manner, competitor stores are identified and the set of their travel
time surfaces forms a series of geo-registered maps supporting further analysis
(Step 2).
Step 3 combines this information for a series of
maps that indicate the relative cost of visitation between our store and each
of the competitor stores (pair-wise comparison as a normalized ratio). The
derived “Gain” factor for each map location is a stable, continuous variable
encapsulating travel-time differences that is suitable for mathematical
modeling. A Gain of less than 1.0
indicates the competition has an advantage with larger values indicating
increasing advantage for our store. For
example, a value of 2.0 indicates that
there is a 200% lower cost of visitation to our store over the competition.
Figure 24 summarizes the
predictive modeling steps involved in competition analysis of retail data. The geo-coding link between the analysis
frame and a traditional customer dataset containing sales history for more than
80,000 customers was used to append travel-times and Gain factors for all
stores in the region (Step 4).
The regression hypothesis
was that sales would be predictable by characteristics of the customer in
combination with the travel-time variables (Step 5). A series of mathematical models are built
that predict the probability of purchase for each product category under
analysis. This provides a set of model
scores for each customer in the region.
Since a number of customers could be found in many grid cells, the
scores were averaged to provide an estimate of the likelihood that a person
from each grid cell would travel to our store to purchase one of the analyzed
products. The scores for each product
are mapped to identify the spatial distribution of probable sales, which in
turn can be “mined” for pockets of high potential sales.
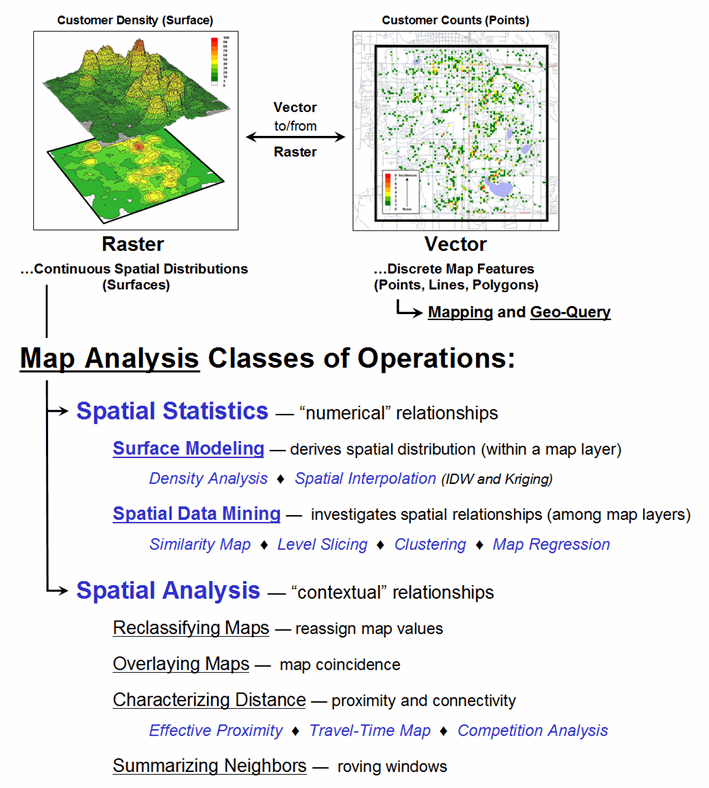
Figure 25. Map Analysis exploits
the digital nature of modern maps to examine spatial patterns and relationships
within and among mapped data.
Targeted marketing,
retail trade area analysis, competition analysis and predictive modeling
provide examples applying sophisticated Spatial Analysis and Spatial
Statistics to improve decision making.
The techniques described in the past nine sections have focused on Map
Analysis— procedures that extend traditional mapping and geo-query to
map-ematically based analysis of mapped data.
Figure 25 outlines the classes of operations described in the series
(blue highlighted techniques were specifically discussed).
Conclusion
Recall that the keystone
concept is an Analysis Frame of grid cells that provides for tracking
the continuous spatial distributions of mapped variables and serves as the
primary key for linking spatial and non-spatial data sets. While discrete sets of points, lines and
polygons have served our mapping demands for over 8,000 years and keep us from
getting lost, the expression of mapped data as continuous spatial distributions
(surfaces) provides a new foothold for the contextual and numerical analysis of
mapped data— in many ways, “thinking with maps” is more different than it is
similar to traditional mapping.
References
Analyzing Geo-Business Data
by Joseph K. Berry (2003; BASIS Press) …a
case study
in Spatial Analysis and Data Mining in Business with software, database and
“hands-on” exercises (US$45; www.innovativegis.com/basis/Books/AnalyzingGBdata/)
Map
Analysis
by Joseph K. Berry (2007; GeoTec Media) …provides
a structured view of grid-based map analysis and GIS modeling with software, database and “hands-on” exercises (US$45; www.innovativegis.com/basis/Books/MapAnalysis/)
Also
see the online book Beyond Mapping III by Joseph K. Berry (BASIS Press) that is posted at
…select
the following topics for more information on grid-based map analysis and
procedures described in this paper:
¾
Topic 7, Linking Data Space and Geographic Space
¾
Topic 10, Analyzing Map Similarity and Zoning
¾
Topic 14, Deriving and Using Travel-Time Maps
¾
Topic 16, Characterizing Patterns and Relationships
¾
Topic 18, Understanding Grid-based Data
¾
Topic 22, Overview of Spatial Analysis and Statistics
¾
Topic 28, Spatial Data Mining in Geo-Business
_______________________________
1 Dr. Berry is the Principal of Berry and Associates // Spatial
Information Systems (BASIS),
consultants and software developers in
2 Dr.
Reed is with Xtreme Data Mining. Prior to this position he was an Associate
Partner with Accenture and head of their retail sales modeling group with
customers throughout the world. His
geo-business projects have extended from analyzing in-store shopping patterns
to modeling sales potential throughout large metropolitan areas.