3D GIS Concepts and Considerations
The excerpts below
on 3D GIS Concepts and Considerations are from the Beyond Mapping
column in GeoWorld. Online versions of
all of the columns in the series from 1996 to the present are available in the
online book Beyond Mapping III at www.innovativegis.com/basis/MapAnalysis/ organized as a Chronological
Listing or by Topic.
Innovation Drives GIS
Evolution, Topic 27— discusses
the cyclic nature of GIS innovation (Mapping, Structure and Analysis)
Referencing the Future, Introduction— describes current and
alternative approaches for referencing geographic and abstract space
Visualizing a
Three-dimensional Reality, Topic 27— uses
visual connectivity to introduce and reinforce concepts of 3D geography
Thinking Outside the Box, Topic 27— discusses concepts and
configuration of 3-dimensional geography
From a Map Pancake to
Soufflé, Topic 27— continues
the discussion of concepts and configuration of a 3D GIS
<click here> for a printer-friendly version (.pdf); electronic version at www.innovativegis.com/basis/Papers/Other/3D_GIS/
________________________________________
Innovation Drives GIS Evolution
(GeoWorld
August, 2007)
What I find interesting is that current
geospatial innovation is being driven more and more by users. In the early years of GIS one would dream up
a new spatial widget, code it, and then attempt to explain to others how and
why they ought to use it. This sounds a
bit like the proverbial “cart in front of the horse” but such backward
practical logic is often what moves technology in entirely new directions.
“User-driven innovation,” on the other hand,
is in part an oxymoron, as innovation—“a
creation, a new device or process resulting from study and experimentation”
(Dictionary.com)—is usually thought of as canonic advancements leading
technology and not market-driven solutions following demand. At the moment, the over 500 billion dollar
advertising market with a rapidly growing share in digital media is dominating
attention and the competition for eyeballs is directing geospatial innovation
with a host of new display/visualization capabilities.
User-driven GIS innovation will become more
and more schizophrenic with a growing gap between the two clans of the GIS user
community as shown in figure 1.
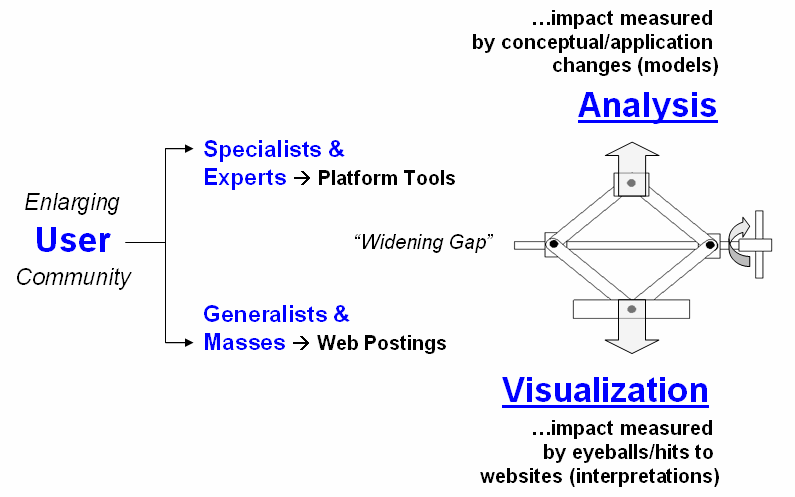
Figure 1. Widening gap in the GIS user community.
Another interesting point is that “radical”
innovation often comes from fields with minimal or no paper map legacy, such as
agriculture and retail sales, because these fields do not have pre-conceived
mapping applications to constrain spatial reasoning and innovation.
In the case of Precision Agriculture, geospatial technology (GIS/RS/GPS) is
coupled with robotics for “on-the-fly” data collection and prescription
application as tractors move throughout a field. In Geo-business,
when you swipe your credit card an analytic process knows what you bought,
where you bought it, where you live and can combine this information with
lifestyle and demographic data through spatial data mining to derive maps of
“propensity to buy” various products throughout a market area. Keep in mind that these map analysis
applications were non-existent a dozen years ago but now millions of acres and
billions of transactions are part of the geospatial “stone soup” mix.
As shown in figure 2 the evolution of GIS is
more cyclical than linear. My greybeard
perspective of over 30 years in GIS suggests that we have been here
before. In the 1970s the research and
early applications centered on Computer
Mapping (display focus) that yielded to Spatial
Data Management (data structure/management focus) in the next decade as we
linked digital maps to attribute databases for geo-query. The 1990s centered on GIS Modeling (analysis focus) that laid the groundwork for whole
new ways of assessing spatial patterns and relations, as well as entirely new
applications such as precision agriculture and geo-business.
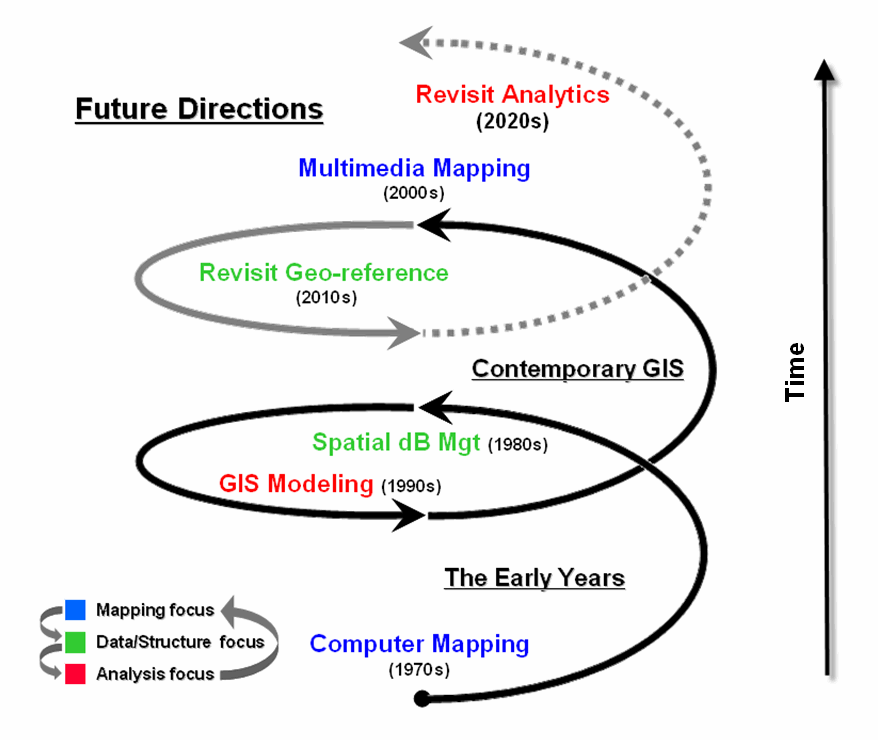
Figure 2.
GIS Innovation/Development cycles.
Today, GIS is centered on Multimedia Mapping (mapping focus) which
brings us full circle to our beginnings.
While advances in virtual reality and 3D visualization can
“knock-your-socks-off” they represent incremental progress in visualizing maps
that exploit dramatic computer hardware/software advances. The truly geospatial innovation awaits the
next re-focusing on data/structure and analysis.
The bulk of the current state of geospatial
analysis relies on “static coincidence
modeling” using a stack of geo-registered map layers. But the frontier of GIS research is shifting
focus to “dynamic flows modeling”
that tracks movement over space and time in three-dimensional geographic
space. But a wholesale revamping of data
structure is needed to make this leap.
The impact of the next decade’s evolution
will be huge and shake the very core of GIS—the Cartesian coordinate system
itself …a spatial referencing concept introduced by mathematician Rene
Descartes 400 years ago.
The current 2D square for geographic referencing
is fine for “static coincidence” analysis over relatively small land areas, but
woefully lacking for “dynamic 3D flows.”
It is likely that Descartes’ 2D squares will be replaced by hexagons
(like the patches forming a soccer ball) that better represent our curved
earth’s surface …and the 3D cubes replaced by nesting polyhedrals for a
consistent and seamless representation of three-dimensional geographic
space. This change in referencing
extends the current six-sides of a cube for flow modeling to the twelve-sides
(facets) of a polyhedral—radically changing our algorithms as well as our
historical perspective of mapping (see April 2007 Beyond Mapping column for more discussion).
The new geo-referencing framework provides a
needed foothold for solving complex spatial problems, such as intercepting a
nuclear missile using supersonic evasive maneuvers or tracking the air, surface
and groundwater flows and concentrations of a toxic release. While the advanced map analysis applications
coming our way aren’t the bread and butter of mass applications based on
historical map usage (visualization and geo-query of data layers) they
represent natural extensions of geospatial conceptualization and analysis
…built upon an entirely new set analytic tools, geo-referencing framework and a
more realistic paradigm of geographic space.
____________________________
Author’s Note: I have been
involved in research, teaching, consulting and GIS software development since
1971 and presented my first graduate course in GIS Modeling in 1977. The discussion in these columns is a
distillation of this experience and several keynotes, plenary presentations and
other papers—many are posted online at www.innovativegis.com/basis/basis/cv_berry.htm.
(GeoWorld,
April 2007)
Geo-referencing is the
cornerstone of GIS. In the mid-1600s the
French mathematician, René Descartes established the Cartesian
coordinate system that is still in use today.
The system determines the
location of each point in a plane as defined by two numbers—its x-coordinate
and y-coordinate. A third z-coordinate is used to extend the
system to 3-dimensional geographic space.
In mapping, these coordinates reference a refined ellipsoid
(geodetic datum) that can be conceptualized as a curved surface
approximating the mean ocean surface of the earth.
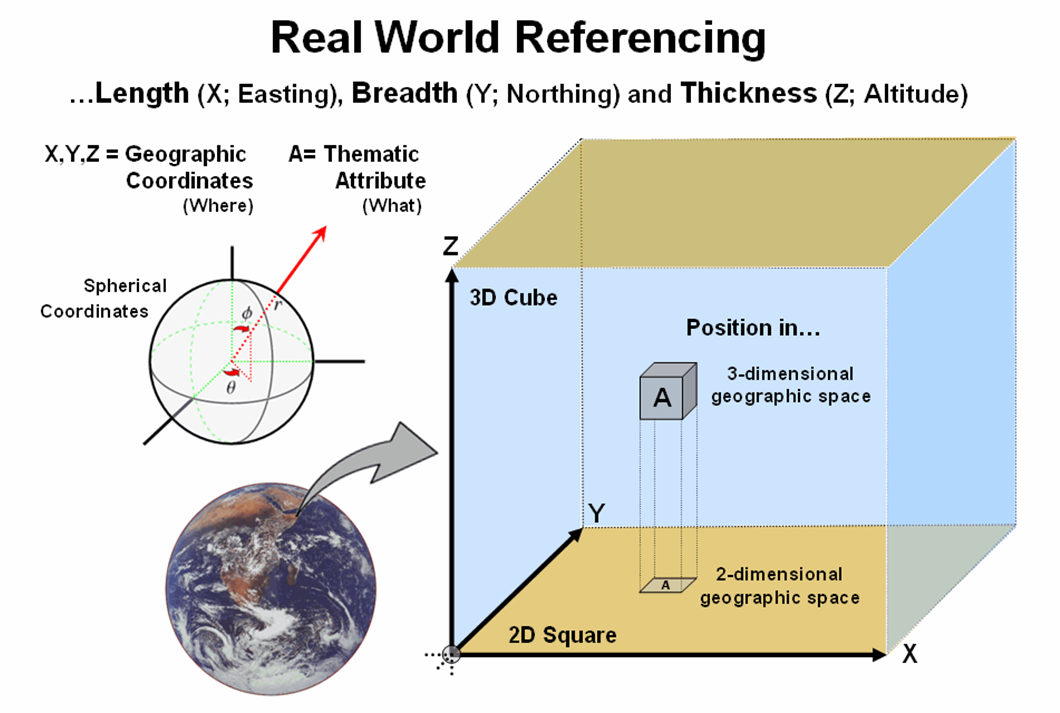
Figure 1.
Geographic referencing uses three coordinates to locate map features in real
world space.
The location and shape of map features can be
established by X and Y distances measured along flattened portions of the
reference surface (figure 1). The
familiar Universal Transverse Mercator (UTM) coordinates
represent E-W and N-S movements in meters along the plane. The rub is that UTM zones are need to break
the curved earth surface into a series of small flat, projected subsections
that are difficult to edge-match.
A variant of the traditional referencing system uses spherical coordinates that are based on solid angles measured from the center of the earth. This natural form for describing positions on a sphere is defined by three coordinates—an azimuthal angle (θ) in the X,Y plane from the x-axis, the polar angle (φ) from the z-axis, and the radial distance (r) from the earth’s center (origin). The advantage of a spherical referencing system is that it is seamless throughout the globe and doesn’t require projecting to a localized flat plane.
Digital map storage is
rapidly moving toward spherical referencing that uses latitude and longitude in
decimal degrees for internal storage and on-the-fly conversion to any planar
projection. This radical change from our
paper map heritage is fueled by ubiquitous use of GPS and a desire for
global databases that easily walk across political and administrative
boundaries.
Since the digital map is a radical departure from
the paper map, other alternative referencing schemes are possible. For example, hexagons can replace the
Cartesian grid squares we have used for hundreds of years (top portion of
figure 2). The hexagon naturally nests
to form a continuous network like a beehive’s honeycomb. An important property of a hexagon grid is
that it better represents curved surfaces than a square grid— a socccer ball
stiched from squares wouldn’t roll the same.
However the most important property is that a
hexagon has six sides instead of four.
The added directions provide a foothold for more precise measurement of
continuous movement— one can turn right- and left-oblique as well as just right
and left. Traditional routing models
using Least Cost Path would benefit greatly.
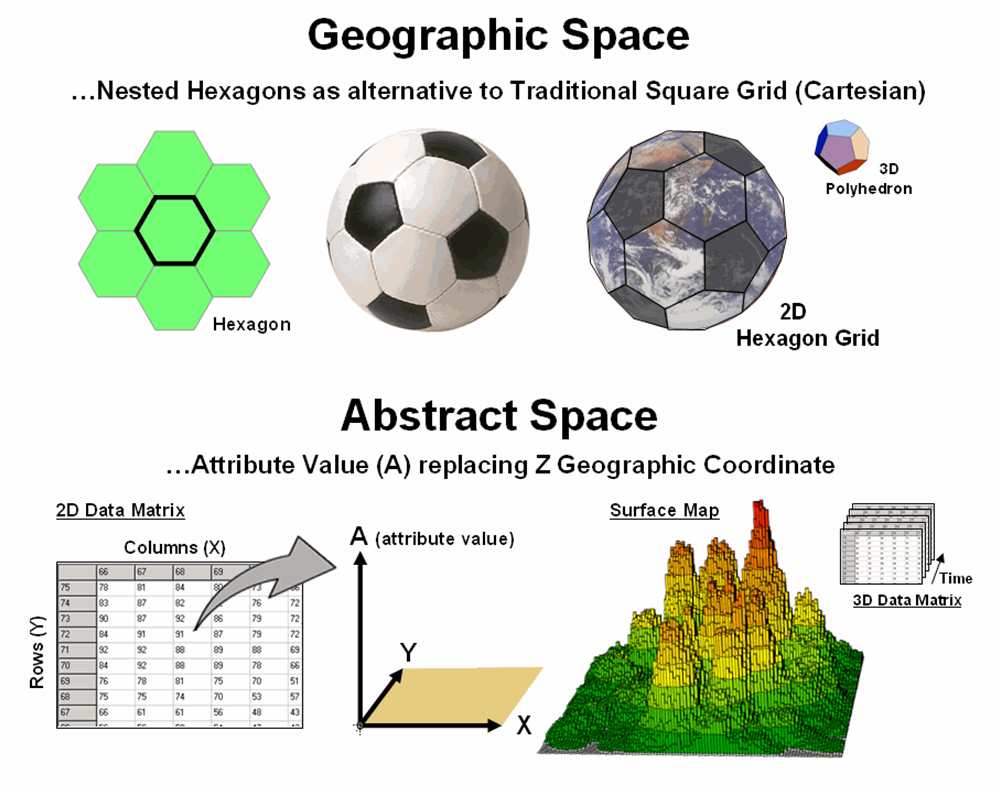
Figure
2. Alternative referencing systems and
abstract space characterization are possible through the digital nature of
modern maps.
Expanding to 3-dimensional geographic space provides for polyhedrons to replace cubes. For example, a dodecahedron is a nesting twelve-sided object that can be used instead of the six-sided cube. Weather and ground water flow modeling could be greatly enhanced by the increased options for transfer from a location to its larger set of adjoining locations. The computations for cross-products of vectors, such as warp-speed cruise missiles, could be greatly assisted as they are affected by different atmospheric conditions and evasive trajectories.
Another extension involves the use of abstract space (bottom portion of figure 2). For example, the Z-coordinate can be replaced with an attribute value to generate a map surface, such as customer density. In this instance, the abstract referencing is a mixture of spatial and attribute “coordinates” and doesn’t imply 3-dimensional, real word geographic occurrences. Instead, it relates geography and conditions in an extremely useful way for conceptualizing patterns. Normalization along the abstract coordinate axis is an important consideration for both visualization and analysis.
This brings us to space-time referencing. During a recent panel discussion I was challenged for suggesting such a combination is possible within a GIS. The idea has been debated for years by philosophers and physicists but H.G. Wells’ succinct description is one of the best—
'Clearly,' the Time Traveller
proceeded, 'any real body must have extension in four directions: it must have
Length, Breadth, Thickness, and - Duration. But through a natural infirmity of
the flesh, which I will explain to you in a moment, we incline to overlook this
fact. There are really four dimensions, three which we call the three planes of
Space, and a fourth, Time. There is, however, a tendency to draw an unreal
distinction between the former three dimensions and the latter, because it
happens that our consciousness moves intermittently in one direction along the
latter from the beginning to the end of our lives.' (Chapter 1, Time
Machine).
The upshot seems to be
that a fourth dimension exists (see Author’s Notes), it is just you can’t go
there in person. But a GIS can easily
take you there - conceptually. For
example, an additional abstract “coordinate” representing time can be added to
form a 3-dimentional data matrix. The
GIS picks off the customer density data for the first “page” and displays it as
in the figure. Then it uses the data on
the on the second page (one time step forward) and displays it. This is repeated to cycle through time and
you see an animation where the peaks and valleys of the density surface move
with time.
So animation enables your to move around a city (X,Y) viewing the space-time relationship of customer density (A). In a similar manner you could evaluate a forest “green-up” model to predict re-growth at a series of time steps after harvesting to look into future landscape conditions. Or you can watch the progression over time of ground water pollutant flow in 3D space (4D data matrix) using a semi-transparent dodecahedron solid grid just for fun and increased modeling accuracy. In fact, it can be argued that GIS is inherently n-dimensional when you consider a map stack of multiple attributes and time is simply another abstract dimension.
My suspicions are that revolutions in referencing will be a big part of GIS’s frontier in the 2010s. See you there?
_____________________________
Author’s
Notes: an excellent
online reference for the basic geometry concepts underlying traditional and
future geo-referencing techniques is the Wolfram MathWorld pages, such as the
posting describing the dodecahedron at http://mathworld.wolfram.com/Dodecahedron.html; a BBC
article contains an interesting discussion of the space/time reality at http://www.bbc.co.uk/science/space/exploration/timetravel/index.shtml.
Visualizing a 3-dimensional Reality
(GeoWorld
October, 2009)
I have always thought of
geography in three-dimensions. Growing
up in California’s high Sierras I was surrounded by peaks and valleys. The pop-up view in a pair of aerial photos
got me hooked as an undergrad in forestry at UC Berkeley during the 1960’s
while dodging tear gas canisters.
My doctoral work
involved a three-dimensional computer model that simulated solar radiation in a
vegetation canopy (SRVC). The
mathematics would track a burst of light as it careened through the atmosphere
and then bounce around in a wheat field or forest with probability functions
determining what portion was absorbed, transmitted or reflected based on plant
material and leaf angles. Solid geometry
and statistics were the enabling forces, and after thousands of stochastic
interactions, the model would report the spectral signature characteristics a
satellite likely would see. All this was
in anticipation of civilian remote sensing systems like the Earth Resources
Technology Satellite (ERTS, 1973), the precursor to the Landsat program.
This experience further
entrenched my view of geography as three-dimensional. However, the ensuing decades of GIS
technology have focused on the traditional “pancake perspective” that flatten
all of the interesting details into force-fitted plane geometry. Even more disheartening is the assumption
that everything can be generalized into a finite set of hard boundaries
identifying discrete spatial objects defined by points, lines and
polygons. While this approach has served
us well for thousands of years and we have avoided sailing off the edge of the
earth, geotechnology is taking us “where no mapper
has gone before,” at least not without a digital map and a fairly hefty
computer.
Consider the Google Earth image of Mount St. Helens in the upper-left
portion of figure 1. The peaks poke-up
and the valleys dip down with a realistic land cover wrapper. This three-dimensional rendering of geography
is a far cry from the traditional flat map with pastel colors imparting an
abstract impression of the area. You can
zoom-in and out, spin around and even fly through the landscape or gaze skyward
to the stars and other galaxies.
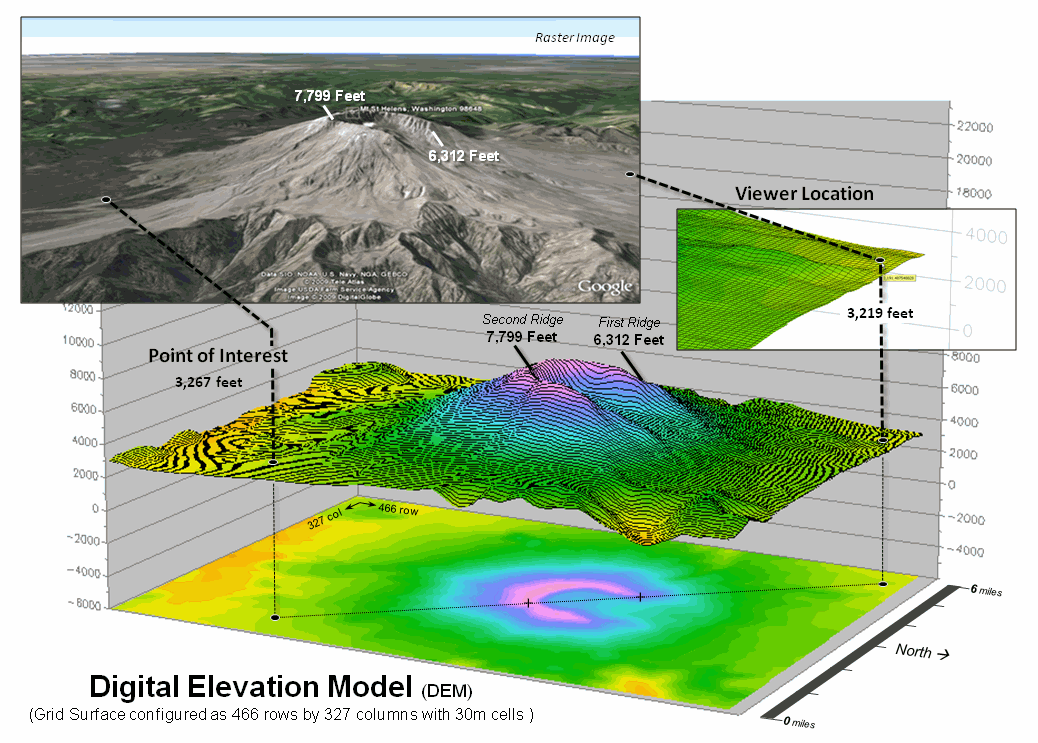
Figure 1. Mount St. Helens topography.
Underlying all this is a Digital Elevation Model (DEM) that
encapsulates the topographic undulations.
It uses traditional X and Y coordinates to position a location plus a Z
coordinate to establish its relative height above a reference geode (sea level
in this case). However from a purist’s
perspective there are a couple of things that keep it from being a true
three-dimensional GIS. First, the raster
image is just that— a display in which thousands the “dumb” dots coalesce to
form a picture in your mind, not an “intelligent” three-dimensional data
structure that a computer can understand.
Secondly, the rendering is still somewhat two-dimensional as the mapped
information is simply “draped” on a wrinkled terrain surface and not stored in
a true three-dimensional GIS—a warped pancake.
The DEM in the background forms Mt St. Helen’s three-dimensional terrain surface by storing elevation values in a matrix of 30 meter grid cells of 466 rows by 327 columns (152, 382 values). In this form, the computer can “see” the terrain and perform its map-ematical magic.
Figure 2 depicts a bit of computational gymnastics involving
three-dimensional geography. Assume you
are standing at the viewer location and looking to the southeast in the
direction of the point of interest. Your
elevation is 3,219 feet with the mountain’s western rim towering above you at
6,312 feet and blocking your view of anything beyond it. In a sense, the computer “sees” the same
thing—except in mathematical terms.
Using similar triangles, it can
calculate the minimum point-of-interest height needed to be visibly connected
as (see author’s notes for a link to discussion of the more robust “splash
algorithm” for establishing visual connectivity)…
Tangent = Rise / Run
= (6312 ft – 3219 ft) / (SQRT[(134 – 33)2
+ (454 – 325) 2 ] * 98.4251 ft)
= 3093 ft / (163.835 * 98.4251 ft) = 3893
ft / 16125 ft = 0.1918
Height = (Tangent *
Run) + Viewer Height
= (0.1918 * (SQRT[(300 – 33)2 + (454 – 114) 2
] * 98.4251 ft)) + 3219 ft
= (0.1918 * 432.307 * 98.4251 ft) + 3219
= 11,380 Feet
Figure
2. Basic geometric relationships
determine the minimum visible height considering intervening ridges.
Since the computer knows that the elevation on the grid surface at that
location is only 3,267 feet it knows you can’t see the location. But if a plane was flying 11,380 feet over
the point it would be visible and the computer would know it.
Conversely, if you “helicoptered-up” 11,000 feet (to 14,219 feet
elevation) you could see over both of the caldron’s ridges and be visually
connected to the surface at the point of interest (figure 3). Or in a military context, an enemy combatant
at that location would have line-of-sight detection.
As your vertical rise increases from the terrain surface, more and more
terrain comes into view (see author’s
notes for a link to an animated slide set). The visual exposure surface draped on the
terrain and projected on the floor of the plot keeps track of the number of
visual connections at every grid surface location in 1000 foot rise increments. The result is a traditional two-dimensional
map of visual exposure at each surface location with warmer tones representing
considerable visual exposure during your helicopter’s rise.
However, the vertical bar in figure 3 depicts the radical change that
is taking us beyond mapping. In this
case the two-dimensional grid “cell” (termed a pixel) is replace by a
three-dimensional grid “cube” (termed a voxel)—an extension from the concept of
an area on a surface to a glob in a volume.
The warmer colors in the column identify volumetric locations with
considerable visual exposure.
Figure
3. 3-D Grid Data Structure is a direct expansion of the 2D structure with X, Y and Z coordinates
defining the position in a 3-dimensional data matrix plus a value
representing the characteristic or condition (attribute) associated with that
location.
Now imagine a continuous set of columns rising above and below the
terrain that forms a three-dimensional project extent—a block instead of an
area. How is the block defined and
stored; what new analytical tools are available in a volumetric GIS; what new
information is generated; how might you use it? …that’s fodder for the next
section. For me, it’s a blast from the
past that is defining the future of geotechnology.
____________________________
Author’s
Notes: for a more
detailed discussion of visual connectivity see the online book Beyond
Mapping III, Topic 15, “Deriving and Using Visual Exposure Maps” at www.innovativegis.com/basis/MapAnalysis/Topic15/Topic15.htm. An annotated slide set demonstrating visual
connectivity from increasing viewer heights is posted at www.innovativegis.com/basis/MapAnalysis/Topic27/AnimatedVE.ppt.
Thinking Outside the Box (pun intended)
(GeoWorld
November, 2009)
Last section used a
progressive series of line-of-sight connectivity examples to demonstrate
thinking beyond a 2-D map world to a three-dimensional world. Since the introduction of the digital map,
mapping geographic space has moved well beyond its traditional planimetric
pancake perspective that flattens a curved earth onto a sheet of paper.
A contemporary Google Earth display provides an interactive 3-D image
of the globe that you can fly through, zoom-up and down, tilt and turn much
like Luke Skywalker’s bombing run on the Death Star. However both the traditional 2-D map and
virtual reality’s 3-D visualization view the earth as a surface—flattened to a
pancake or curved and wrinkled a bit to reflect the topography.
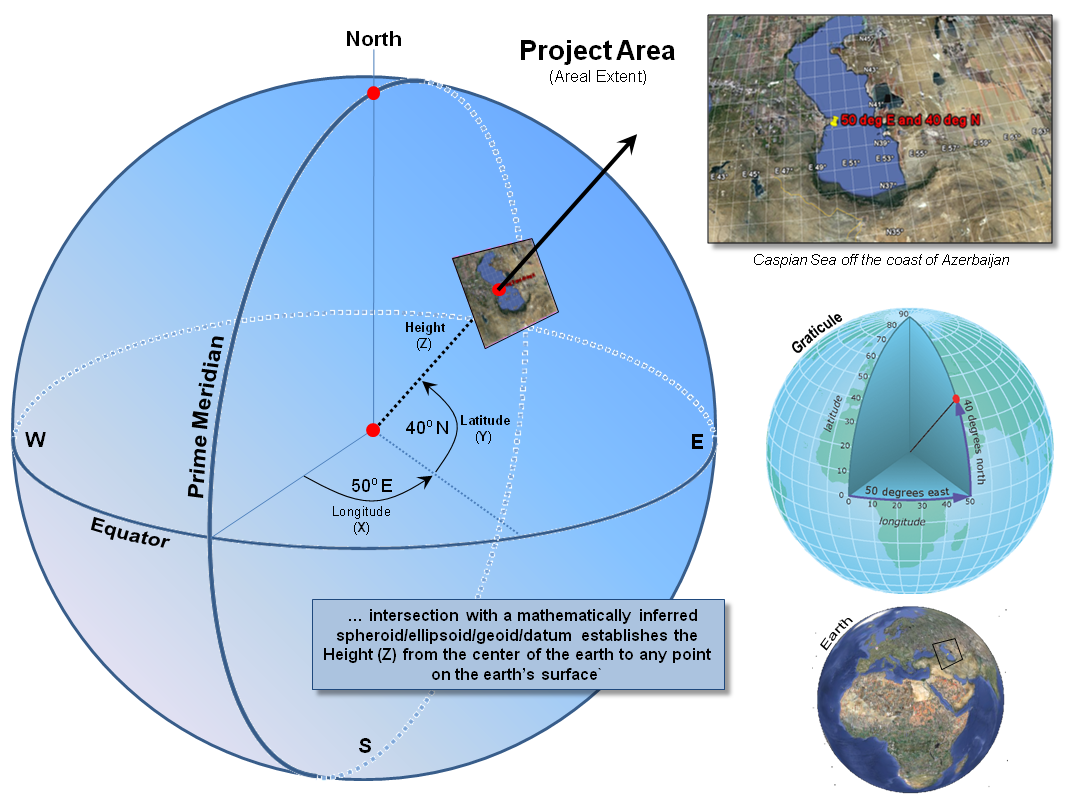
Figure 1. A 3-dimensional coordinate system
uses angular measurements (X,Y) and length (Z) to locate points on the earth’s
surface.
Figure 1 summarizes the key elements in locating yourself on the earth’s
surface …sort of a pop-quiz from those foggy days of Geography 101. The Prime Meridian and Equator serve as base
references for establishing the angular movements expressed in degrees of
Longitude (X) and Latitude (Y) of an imaginary vector from the center of the
earth passing through any location. The
Height (Z) of the vector positions the point on the earth’s surface.
It’s the determination of height that causes most of us to trip over
our geodesic mental block. First, the
globe is not a perfect sphere but is a squished ellipsoid that is scrunched at
the poles and pushed out along the equator like love-handles. Another way to conceptualize the physical
shape of the surface is to imagine blowing up a giant balloon such that it
“best fits” the actual shape of the earth (termed the geoid) most often
aligning with mean sea level. The result
is a smooth geometric equation characterizing the general shape of the earth’s
surface.
But the earth’s
mountains bump-up and valleys bump-down from the ellipsoid so a datum is
designed to fit the earth's surface that accounts for the actual wrinkling of
the globe as established by orbiting satellites. The
most common datum for the world is WGS 84 (World Geodetic System 1984) used by all GPS equipment and tends to have and accuracy of
+/- 30 meters or less from the actual local elevation anywhere on the
surface.
The final step in traditional mapping is to flatten the curved and
wrinkled surface to a planimetric projection and plot it on a piece of paper or
display on a computer’s screen. It is at
this stage all but the most fervent would-be geographers drop the course, or at
least drop their attention span.
However, a true 3-D GIS simply places the surface in volumetric grid
elements along with others above and below the surface. The right side of figure 2 shows a Project
Block containing a million grid elements (termed “voxels”) positioned by their
geographic coordinates—X (easting), Y (northing) and Z (height). The left side depicts stripping off one row
of the elevation values defining the terrain surface and illustrating a small
portion of them in the matrix by shading the top’s of the grids containing the
surface.
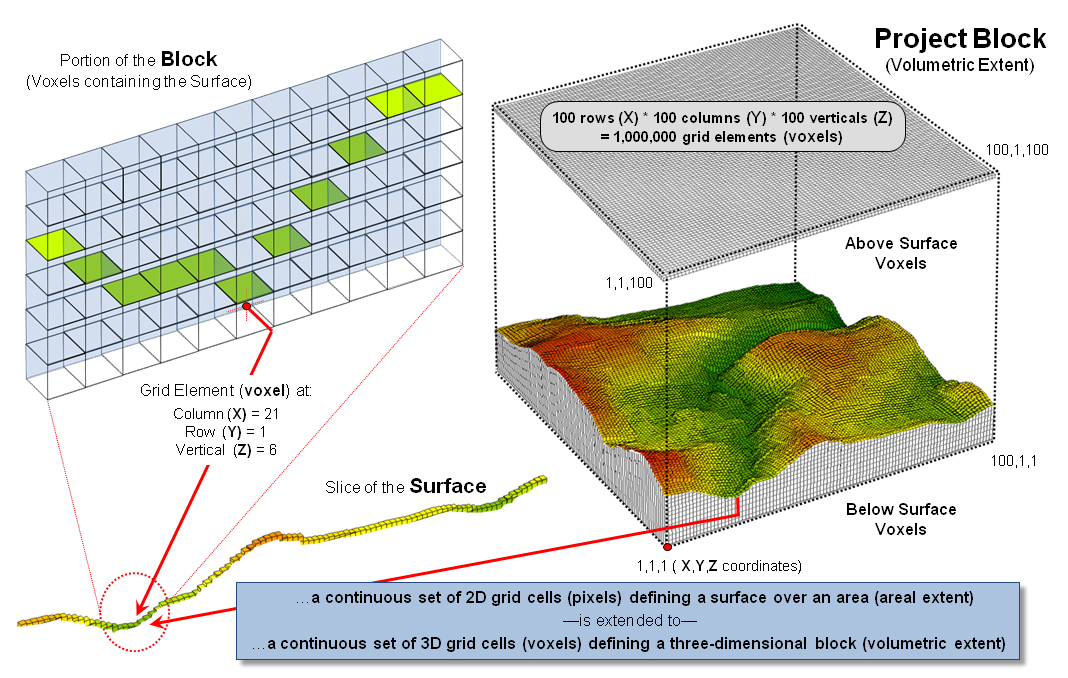
Figure 2. An implied 3-D matrix defines a
volumetric Project Block, a concept analogous to areal extent in traditional
mapping.
At first the representation in a true 3-D data structure seems trivial
and inefficient (silly?) but its implications are huge. While topographic relief is stable (unless
there is another Mount St. Helens blow that redefines local elevation) there
are numerous map variables that can move about in the project block. For example, consider the weather “map” on
the evening news that starts out in space and then dives down under the rain
clouds. Or the National Geographic show
that shows the Roman Coliseum from
above then crashes through the walls to view the staircases and then proceeds
through the arena’s floor to the gladiators’ hypogeum with its subterranean network of tunnels and cages.
Some “real
cartographers” might argue that those aren’t maps but just flashy graphics and
architectural drawings …that there has been a train wreck among mapping,
computer-aided drawing, animation and computer games. On the other hand, there are those who
advocate that these disciplines are converging on a single view of space—both
imaginary and geographic. If the X, Y
and Z coordinates represent geographic space, nothing says that Super Mario
couldn’t hop around your neighborhood or that a car is stolen from your garage
in Grand Theft Auto and race around the streets in your hometown.
The unifying concept is a “Project Block” composed of millions of
spatially-referenced voxels.
Line-of-sight connectivity determines what is seen as you peek around a
corner or hover-up in a helicopter over a mountain. While the mathematics aren’t for the
faint-hearted or tinker-toy computers of the past, the concept of a “volumetric
map” as an extension of the traditional planimetric map is easy to grasp—a
bunch of three-dimensional cubic grid elements extending up and down from our
current raster set of squares (bottom of figure 3).
However, akin to the seemingly byzantine details in planimetric
mapping, things aren’t that simple. Like
the big bang of the universe, geographic space expands from the center of the
earth and a simple stacking of fixed cubes like wooden blocks won’t align
without significant gaps. In addition,
the geometry of a cube does not have a consistent distance to all of its
surrounding grid elements and of its twenty six neighbors only six share a
complete side with the remaining neighbors sharing just a line or a single
point. This inconsistent geometry makes
a cube a poor grid element for 3-D data storage.
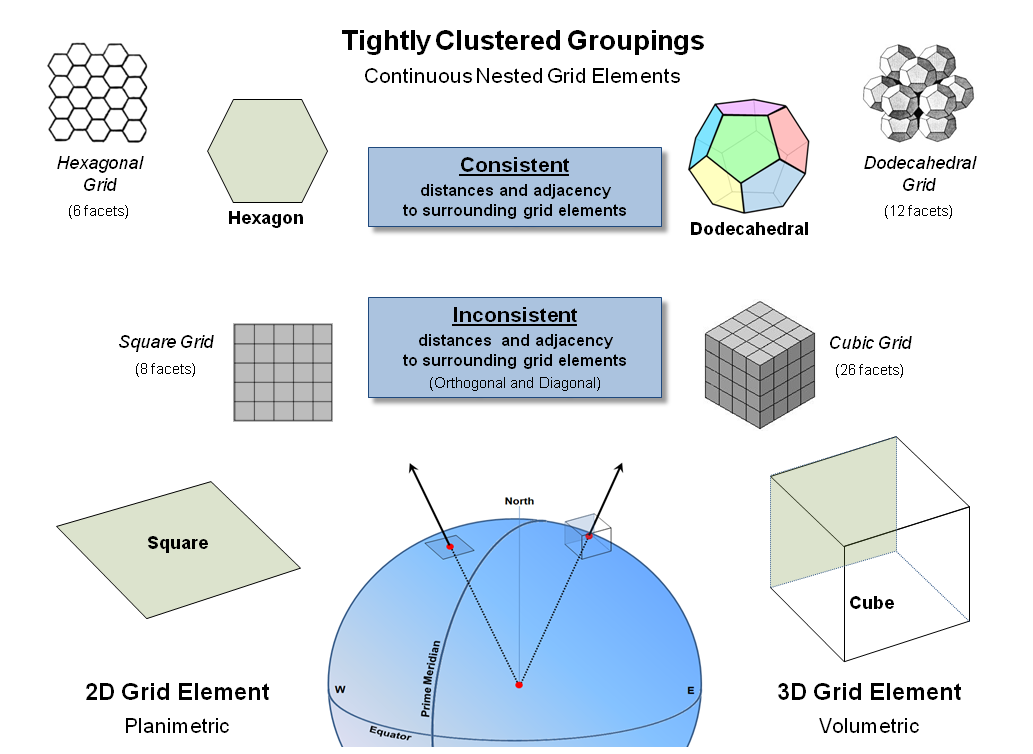
Figure 3.
The hexagon and dodecahedral are alternative grid elements with
consistent nesting geometry.
Similarly, it suggests that the traditional “square” of the Cartesian
grid is a bit limited—only four complete sides (orthogonal elements) and four
point adjacencies (diagonal). Also, the
distances to surrounding elements are different (a ratio of 1:1.414). However, a 2D hexagon shape (beehive honey
comb) abuts completely without gaps in planimetric space (termed “fully
nested”); as does a combination of pentagon and hexagon shapes nests to form
the surface of a spheroid (soccer ball).
To help envision an alternative 3-D grid element shape (top-right of
figure 3) it is helpful to recall Buckminster Fuller's book Synergetics and his classic treatise of various
"close-packing" arrangements for a group of spheres. Except in this instance, the sphere-shaped
grid elements are replaced by "pentagonal dodecahedrons"— a set of
uniform solid shapes with 12 pentagonal faces (termed geometric “facets”) that
when packed abut completely without gaps (termed fully “nested”).
All of the facets are identical, as are the distances between the
centroids of the adjoining clustered elements defining a very “natural”
building block (see Author’s Note). But
as always, “the Devil is in the details” and that discussion is dealt with in
the next section.
_____________________________
Author’s Note: In 2003, a team of cosmologists and
mathematicians used NASA’s WMAP cosmic background radiation data to develop a model
for the shape of the universe. The study
analyzed a variety of different shapes for the universe, including finite
versus infinite, flat, negatively- curved (saddle-shaped), positively- curved
(spherical) space and a torus (cylindrical). The study revealed that the
math adds up if the universe is finite and shaped like a pentagonal
dodecahedron (http://physicsworld.com/cws/article/news/18368). And
if one connects all the points in one of the pentagon facets, a
5-pointed star is formed. The ratios of the lengths of the resulting line
segments of the star are all based on phi, Φ, or 1.618… which is the
“Golden Number” mentioned in the Da Vinci Code as the universal constant of
design and appears in the proportions of many things in nature from DNA to the
human body and the solar system—isn’t mathematics wonderful!
From a
Mapping Pancake to a Soufflé
(GeoWorld November, 2009)
As the Time Traveller noted in H. G. Wells’ classic “The Time Machine,”
the real world has three geometric dimensions not simply the two we
commonly use in mapping. In fact, he
further suggested that “...any real body must have extension in four
directions: Length, Breadth, Thickness—and Duration (time)” …but that’s a whole
other story.
Recall from last month’s column on 3D GIS that Geodetic Referencing (geographic position) used in identifying an “areal extent” in two-dimensions on the earth’s surface can be extended to a Database Referencing system (matrix location) effectively defining a 3-dimensional “project block” (see the left side of figure 1). The key is the use of Geodetic Height above and below the earth’s ellipsoid as measured along the perpendicular from the ellipsoid to provide the vertical (Z) axis for any location in 3-dimensional space.
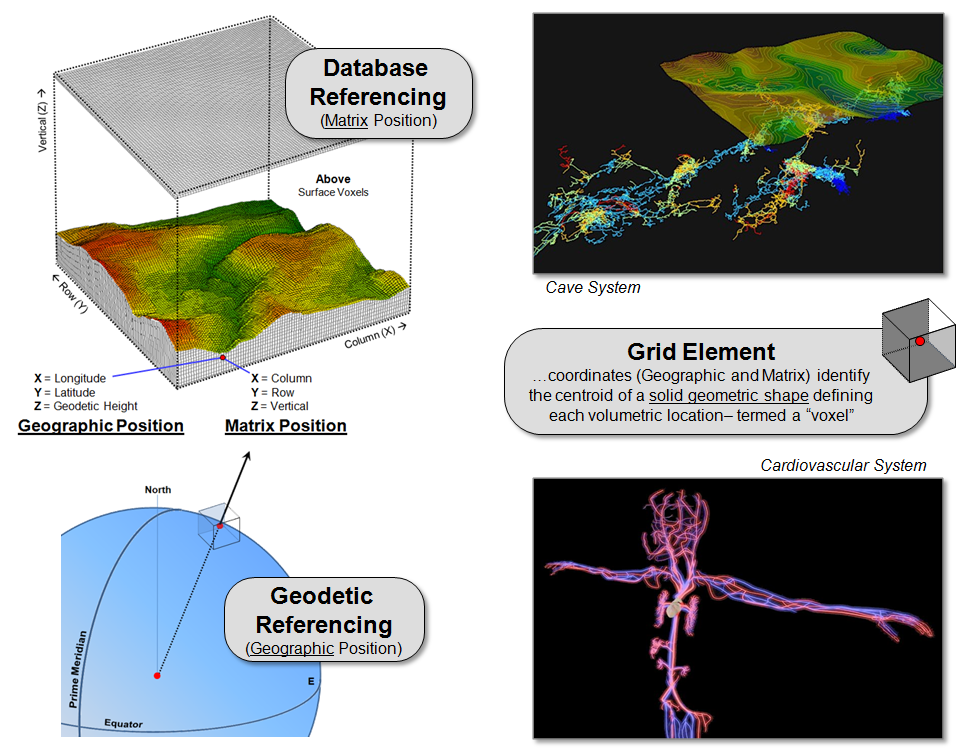
Figure 1. Storage of a vertical
(Z) coordinate extends traditional 2D mapping to
3D volumetric representation.
The result is a coordinate system of columns (X), rows (Y), and
verticals (Z) defining an imaginary matrix of grid elements, or “voxels,” that
are a direct conceptual extension of the “pixels” in a 2D raster image. For example, the top-right inset in figure 1
shows a 3D map of a cave system using ArcGIS 3D Analyst software. The X, Y and Z positioning forms a
3-dimensional display of the network of interconnecting subterranean passages. The lower-right inset shows an analogous
network of blood vessels for the human body except at much different
scale. The important point is that both
renderings are 3D visualizations and not a 3D GIS as they are unable to
perform volumetric analyzes, such as directional flows along the passageways.
The distinction between 3D visualization and analytical systems arises
from differences in their data structures.
A 3D visualization system stores just three values—X and Y for “where”
and Z for “what (elevation).” A
3-dimensional mapping system stores at least four values—X, Y and Z for “where”
and an attribute value for “what” describing the characteristic/condition at
each location within a project block.
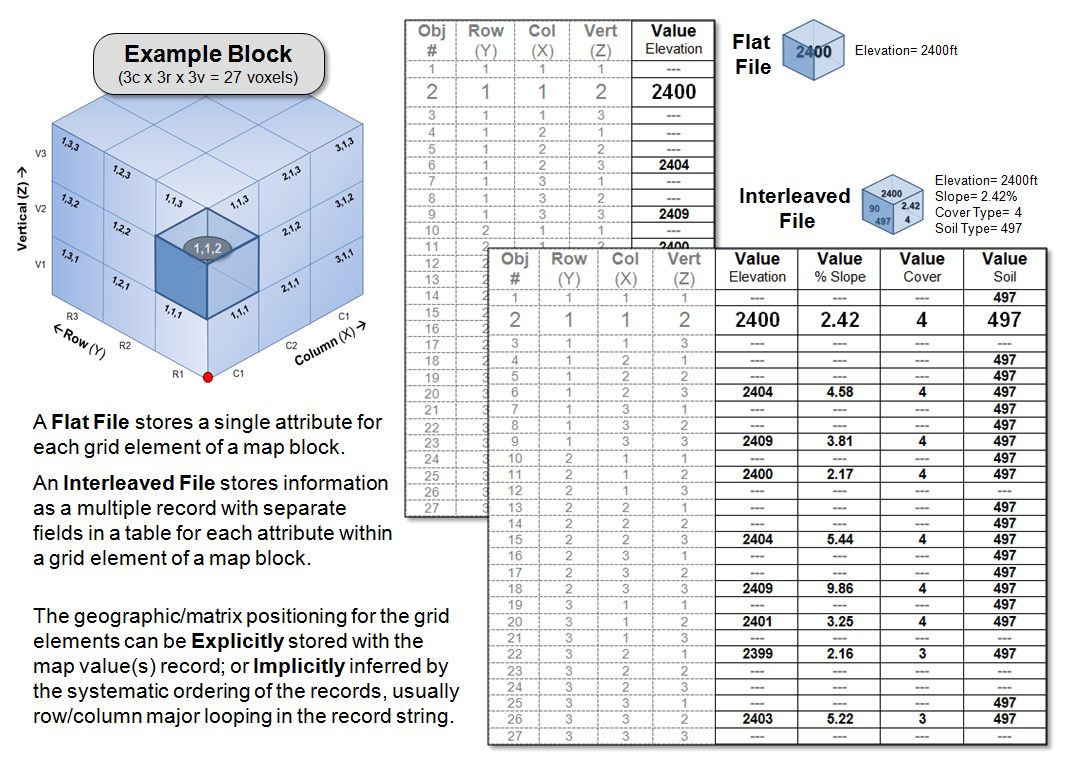
Figure 2. A 3-dimensional matrix
structure can be used to organize volumetric mapped data.
Figure 2 illustrates two ways of storing 3-dimensional grid data. A Flat File stores a single map value for each grid element in a map block. The individual records can explicitly identify each grid element (grayed columns—“where”) along with the attribute (black column—“what”). Or, much more efficiently, the information can be implicitly organized as a header line containing the grid block configuration/size/referencing followed by a long string of numbers with each value’s position in the string determining its location in the block through standard nested programming loops. This shortened format provides for advanced compression techniques similar to those used in image files to greatly reduce file size.
An alternative strategy, termed an Interleaved File, stores a series of map attributes as separate fields for each record that in turn represents each grid element, either implicitly or explicitly organized into a table. Note that in the interleaved file in figure 2, the map values for Elevation, %Slope and Cover type identify surface characteristics with a “null value (---)” assigned to grid elements both above and below the surface. Soil type, on the other hand, contains values for the grid elements on and immediately below the surface with null values only assigned to locations above ground. This format reduces the number of files in a data set but complicates compression and has high table maintenance overhead for adding and deleting maps.
Figure 3 outlines some broader issues and future directions in 3D GIS data storage and processing. The top portion suggests that the inconsistent geometry of the traditional Cube results in differing distances and facet adjacency relationship to the surrounding twenty six neighbors, thereby making a cube a poor grid element for 3D data storage. A Dodecahedron, on the other hand, aligns with a consistent set of 12 equidistant pentagonal faces that “nest” without gaps ...an important condition in spatial analysis of movements, flows and proximal conditions.
The lower portion of figure 3 illustrates the knurly reality of geographic referencing in 3-dimensions—things change as distance from the center of the earth or bounding ellipsoid changes. Nicely nesting grid elements of a fixed size separate as distance increases (diverge); overlap as distance decreases (converge). To maintain a “close-packing” arrangement either the size of the grid element needs to adjust or the progressive errors of fixed size zones are tolerated.
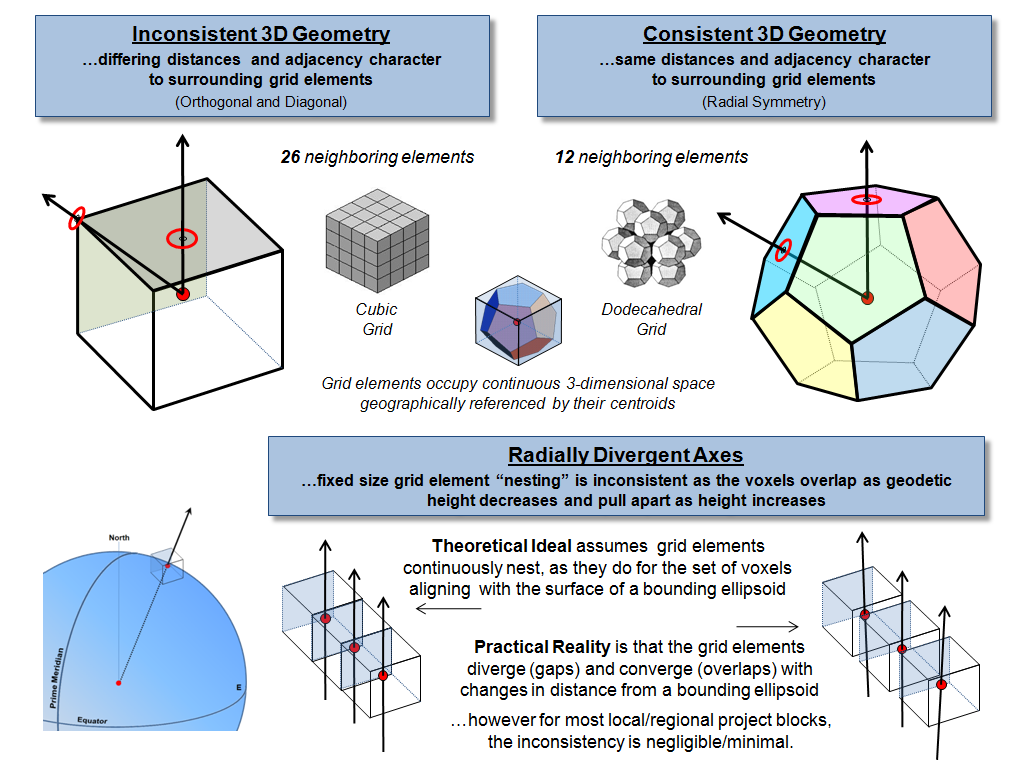
Figure 3. Alternative grid
element shapes and new procedures for dealing with radial divergence
form the basis for continued 3D GIS research and development.
Similar historical changes in mapping paradigms and procedures occurred when we moved from a flat earth perspective to a round earth one that generated a lot of room for rethinking. There are likely some soon-to-be-famous mathematicians and geographers who will match the likes of the great Claudius Ptolemy (90-170), Gerardus Mercator (1512-1594) and Rene Descartes (1596-1650)— I wonder who among us will take us beyond mapping as we know it? Hopefully the advocates of a “flat mapping world” of discrete objects don’t have the same clout as Saint Augustine’s “flat earth” proponents; or the reach of the Spanish Inquisition enforcement arm.
_____________________________
Author’s Notes: A good discussion of polyhedral
and other 3-dimensional coordinate systems is in Topic 12, “Modeling locational
uncertainty via hierarchical tessellation,” by Geoffrey Dutton in Accuracy
of Spatial Databases edited by Goodchild and Gopal. In his discussion he notes that “One common
objection to polyhedral data models for GIS is that computations on the sphere
are quite cumbersome … and for many applications the spherical/geographical
coordinates … must be converted to and from Cartesian coordinates for input and
output.”